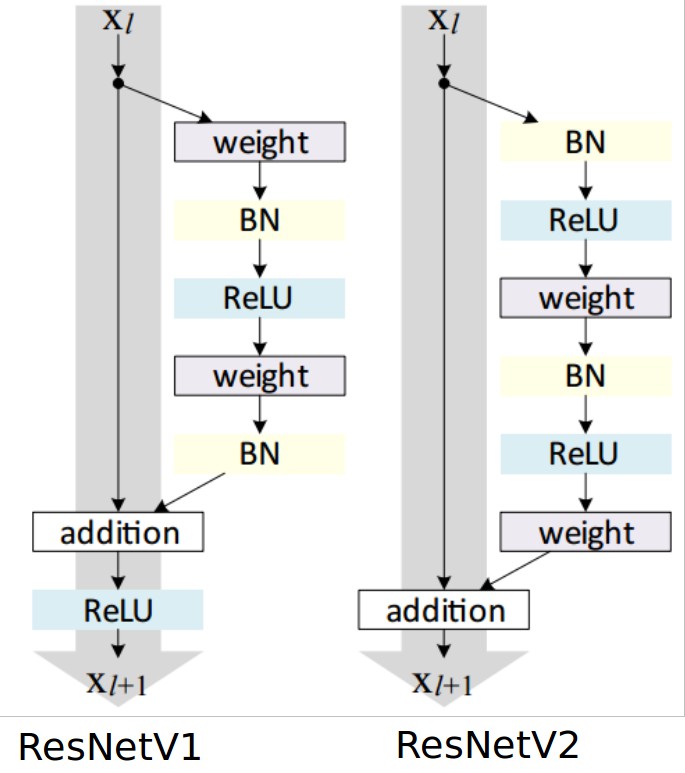
ResNetV1 - Deep Residual Learning for Image Recognition - 2015
ResNetV2 - Identity Mappings in Deep Residual Networks - 2016
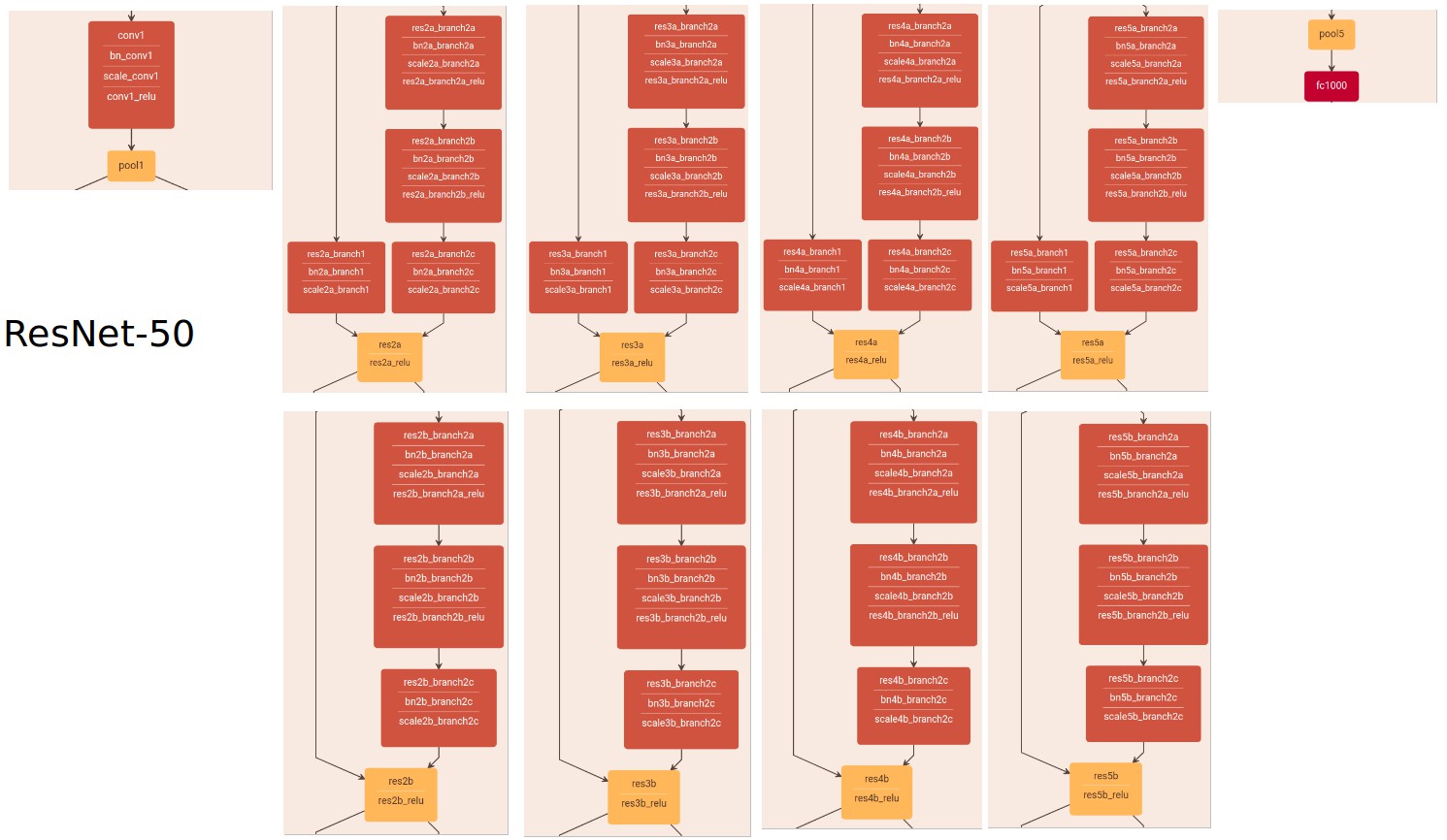
1. ResNetV1
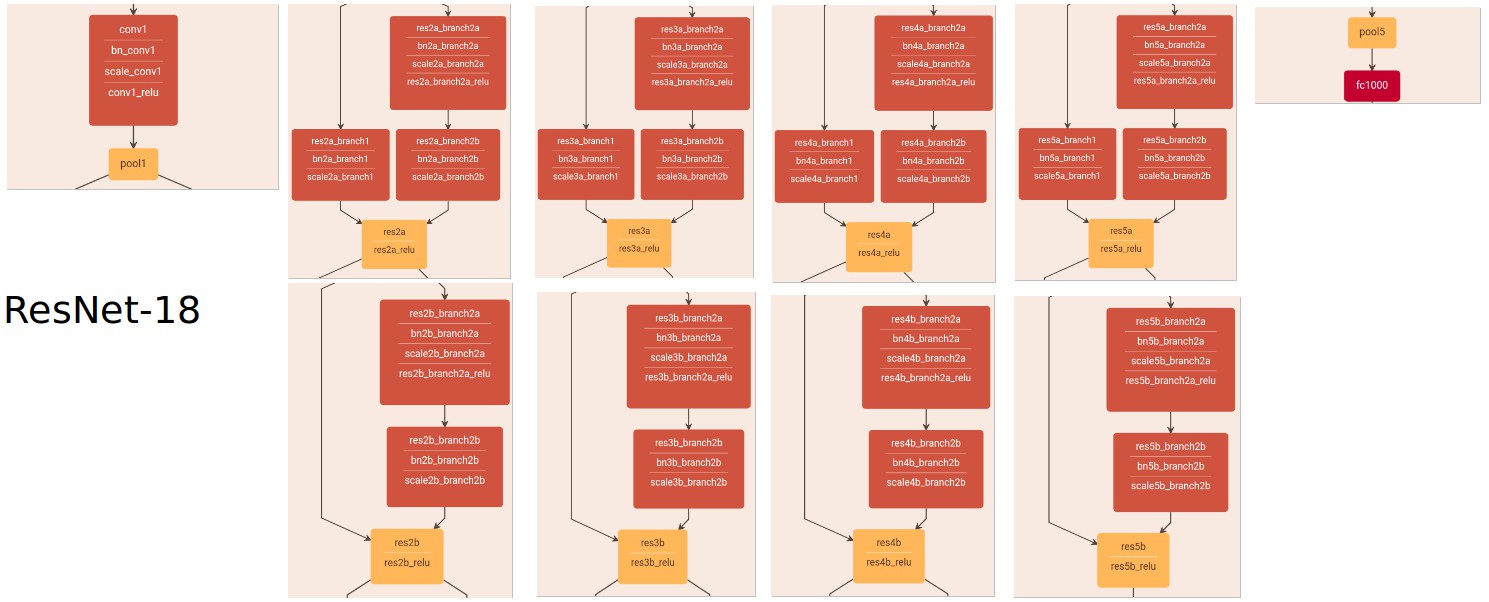
ResNetV1 论文中给出的网络结构:
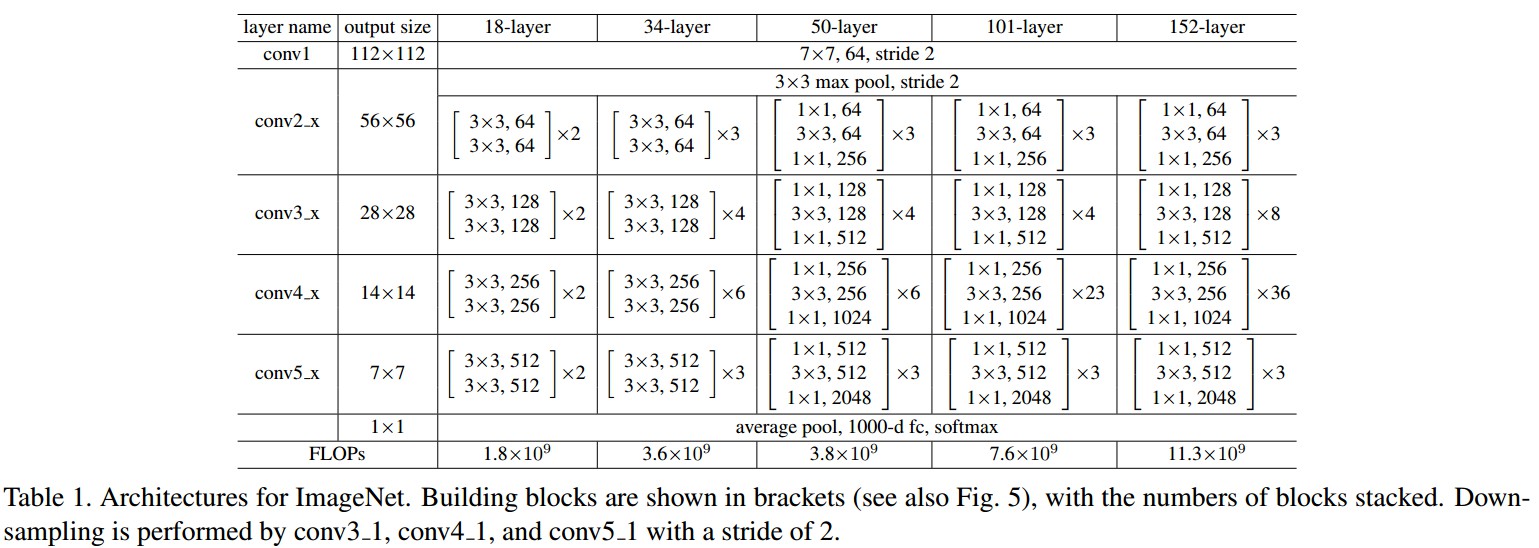
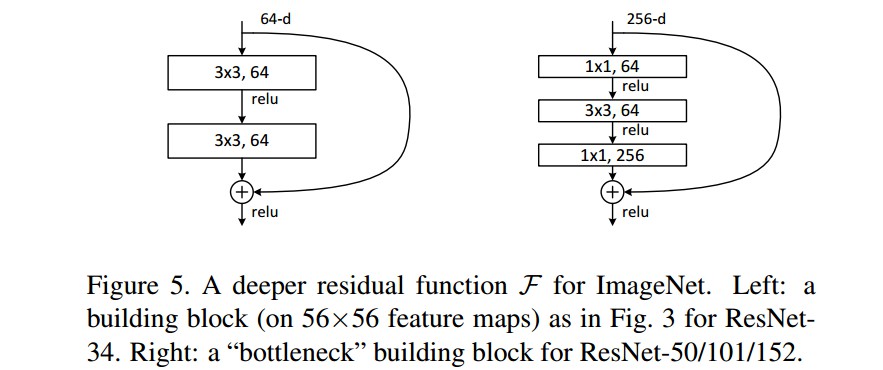
Table1 中,ResNet-18 和 ResNet-34 采用 Figure5(左) 的两层 bottleneck 结构;ResNet-50,ResNet-101 和 ResNet-152 采用 Figure5(右) 的三层 bottleneck 结构.
Tabel1 中的方括号右边乘以的数字,如,2,3,4,5,8,表示 bottleneck 的个数. 如 ResNet-101 的 conv4_x 中乘以36,则,该 block 包含 23 个 bottleneck.
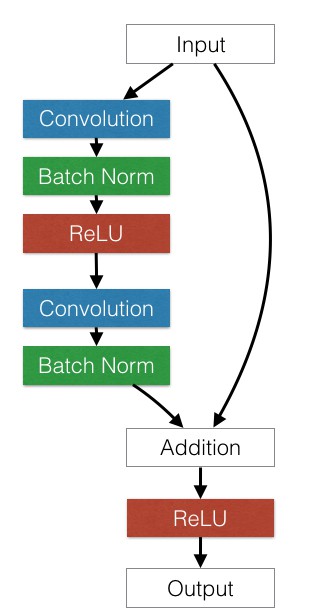
残差单元:
1.1. PyTorch中的定义
import torch.nn as nn
import math
import torch.utils.model_zoo as model_zoo
__all__ = ['ResNet', 'resnet18', 'resnet34', 'resnet50', 'resnet101', 'resnet152']
model_urls = {
'resnet18': 'https://download.pytorch.org/models/resnet18-5c106cde.pth',
'resnet34': 'https://download.pytorch.org/models/resnet34-333f7ec4.pth',
'resnet50': 'https://download.pytorch.org/models/resnet50-19c8e357.pth',
'resnet101': 'https://download.pytorch.org/models/resnet101-5d3b4d8f.pth',
'resnet152': 'https://download.pytorch.org/models/resnet152-b121ed2d.pth',
}
def conv3x3(in_planes, out_planes, stride=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):
# Figure5(左) Block
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class Bottleneck(nn.Module):
# Figure5(右) Block
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=1000):
self.inplanes = 64
super(ResNet, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AvgPool2d(7, stride=1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
def resnet18(pretrained=False, **kwargs):
"""Constructs a ResNet-18 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(BasicBlock, [2, 2, 2, 2], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet18']))
return model
def resnet34(pretrained=False, **kwargs):
"""Constructs a ResNet-34 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(BasicBlock, [3, 4, 6, 3], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet34']))
return model
def resnet50(pretrained=False, **kwargs):
"""Constructs a ResNet-50 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(Bottleneck, [3, 4, 6, 3], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet50']))
return model
def resnet101(pretrained=False, **kwargs):
"""Constructs a ResNet-101 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(Bottleneck, [3, 4, 23, 3], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet101']))
return model
def resnet152(pretrained=False, **kwargs):
"""Constructs a ResNet-152 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(Bottleneck, [3, 8, 36, 3], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet152']))
return model
2. ResNetV2
ResNetV1 和 ResNetV2 残差单元对比:
何凯明给出的 resnet-1k-layers bottleneck 的 lua 实现:
local function bottleneck(nInputPlane, nOutputPlane, stride)
local nBottleneckPlane = nOutputPlane / 4
if nInputPlane == nOutputPlane then -- most Residual Units have this shape
local convs = nn.Sequential()
-- conv1x1
convs:add(SBatchNorm(nInputPlane))
convs:add(ReLU(true))
convs:add(Convolution(nInputPlane,nBottleneckPlane,1,1,stride,stride,0,0))
-- conv3x3
convs:add(SBatchNorm(nBottleneckPlane))
convs:add(ReLU(true))
convs:add(Convolution(nBottleneckPlane,nBottleneckPlane,3,3,1,1,1,1))
-- conv1x1
convs:add(SBatchNorm(nBottleneckPlane))
convs:add(ReLU(true))
convs:add(Convolution(nBottleneckPlane,nOutputPlane,1,1,1,1,0,0))
local shortcut = nn.Identity()
return nn.Sequential()
:add(nn.ConcatTable()
:add(convs)
:add(shortcut))
:add(nn.CAddTable(true))
else -- Residual Units for increasing dimensions
local block = nn.Sequential()
-- common BN, ReLU
block:add(SBatchNorm(nInputPlane))
block:add(ReLU(true))
local convs = nn.Sequential()
-- conv1x1
convs:add(Convolution(nInputPlane,nBottleneckPlane,1,1,stride,stride,0,0))
-- conv3x3
convs:add(SBatchNorm(nBottleneckPlane))
convs:add(ReLU(true))
convs:add(Convolution(nBottleneckPlane,nBottleneckPlane,3,3,1,1,1,1))
-- conv1x1
convs:add(SBatchNorm(nBottleneckPlane))
convs:add(ReLU(true))
convs:add(Convolution(nBottleneckPlane,nOutputPlane,1,1,1,1,0,0))
local shortcut = nn.Sequential()
shortcut:add(Convolution(nInputPlane,nOutputPlane,1,1,stride,stride,0,0))
return block
:add(nn.ConcatTable()
:add(convs)
:add(shortcut))
:add(nn.CAddTable(true))
end
end