原文:Digging Deeper into Metric Learning with Loss Functions - 2019.11.12
作者:Jay Patel
深度度量学习网络(deep metric learning) 旨在将视觉相似图片投影到嵌入流形后彼此相邻,而视觉不相似图片相互分开.
学习得到的深度特征,具有很好的区分性,具有的特点是:类内方差小(差异性下),类间方差大(差异性大). 该特征对于视觉搜索引擎至关重要.
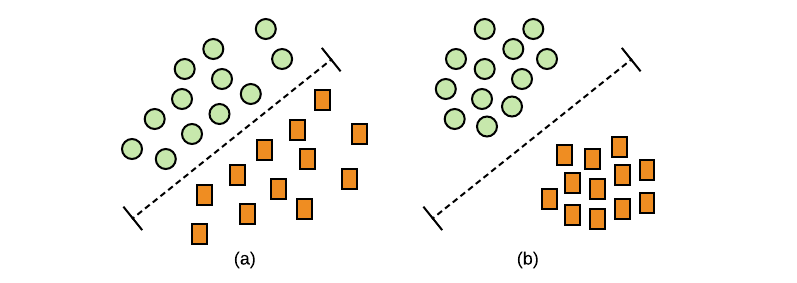
图:(a) 可分离性特征;(b) 可辨别性特征
此外,学习得到区分性特征后,深度网络模型能够很好的概括未曾学习过的产品图片,从而在嵌入空间中形成新的聚类簇.
深度度量学习网络的训练,类似于其他深度网络,区别在于,不同的损失函数显式的将相似图像在嵌入空间里聚集在一起,将不相似的图片彼此分离. 在训练过程中,将训练数据集图像输入网络,然后将其映射到嵌入空间. 使用损失函数来计算映射的损失,并采用适当的优化方法来调整网络权重. 在推理过程中,从嵌入层提取特征,并执行最近邻搜索来识别相似图像.
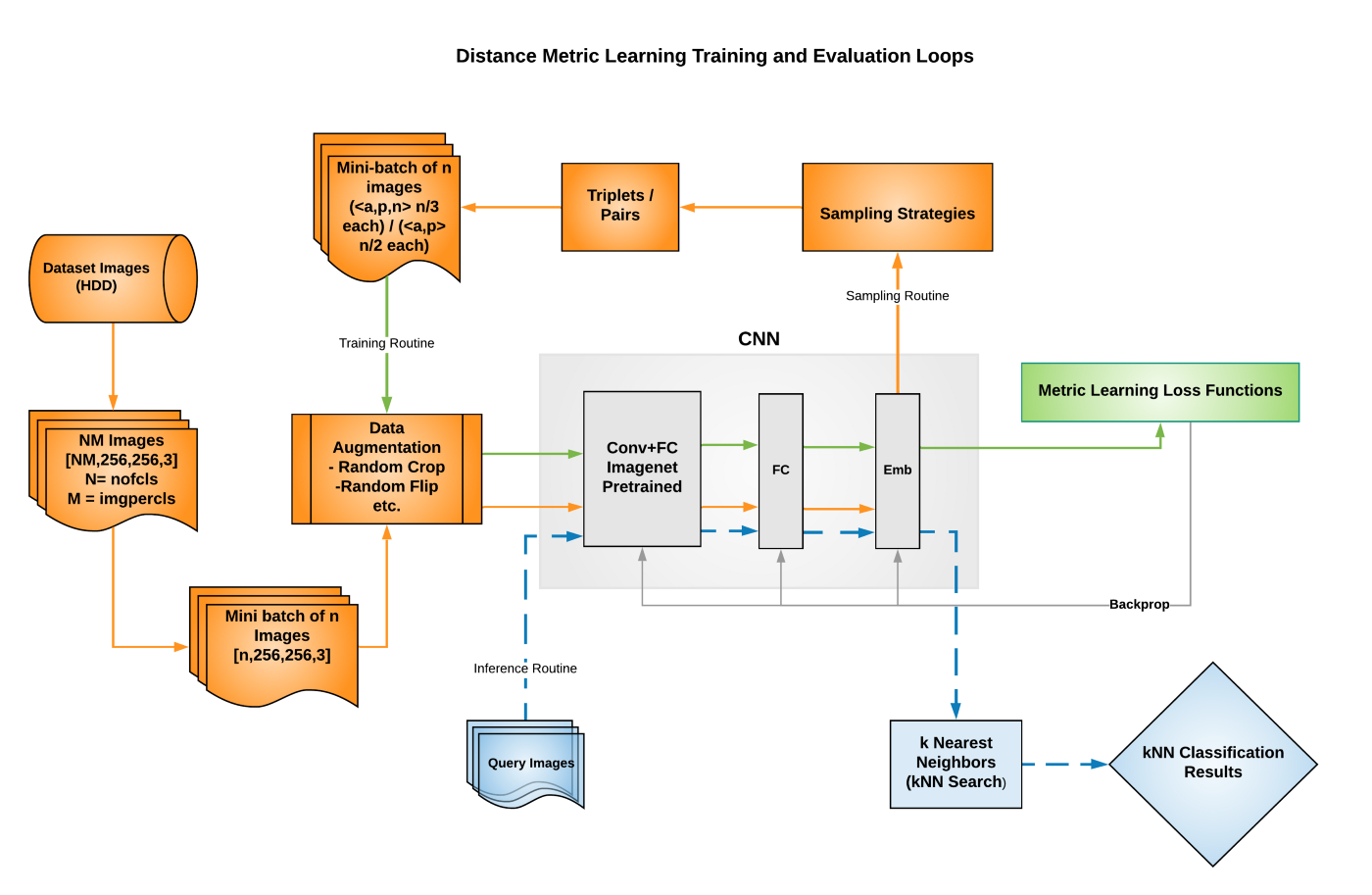
图:度量学习模型的训练和推断路线图示例.
这里汇总了度量学习中普遍使用的损失函数.
1. Contrastive Loss(对比损失)
为了最小化两张相似图片的特征之间的距离,最大化不相似图像的特征之间的距离,对比损失函数同时分别对相似性和不相似性进行计算.
对比损失函数直接计算两张相似图片的特征之间的距离,且考虑不相似图片的特征不能被一个距离间隔 $\alpha$ 分离时的距离.
对比损失函数公式定义如:
$$ L = \frac{1}{m} \sum _{(i,j)} ^{m/2} y_{i,j} D_{i,j}^2 + (1 - y_{i,j})[\alpha - D_{i, j}^2]^+ $$
这里,$m$ 为 mini-batch 内正样本对的数量(anchor-positive)
$D_{i,j} = ||f(x_i) - f(x_j)||^2$ 为图片$x_i$ 和 $x_j$ 的特征 $f(x_i)$ 和 $f(x_j)$ 之间的距离.
$y_{i,j} = +/-1$ 为指示器,如果 $(x_i, x_j)$ 是相似标签,则值为1,否则值为0.
$[.]^+$ 是 hinge 损失函数 $max(0, .)$.
每个特征向量对分别独立生成损失项,如图:
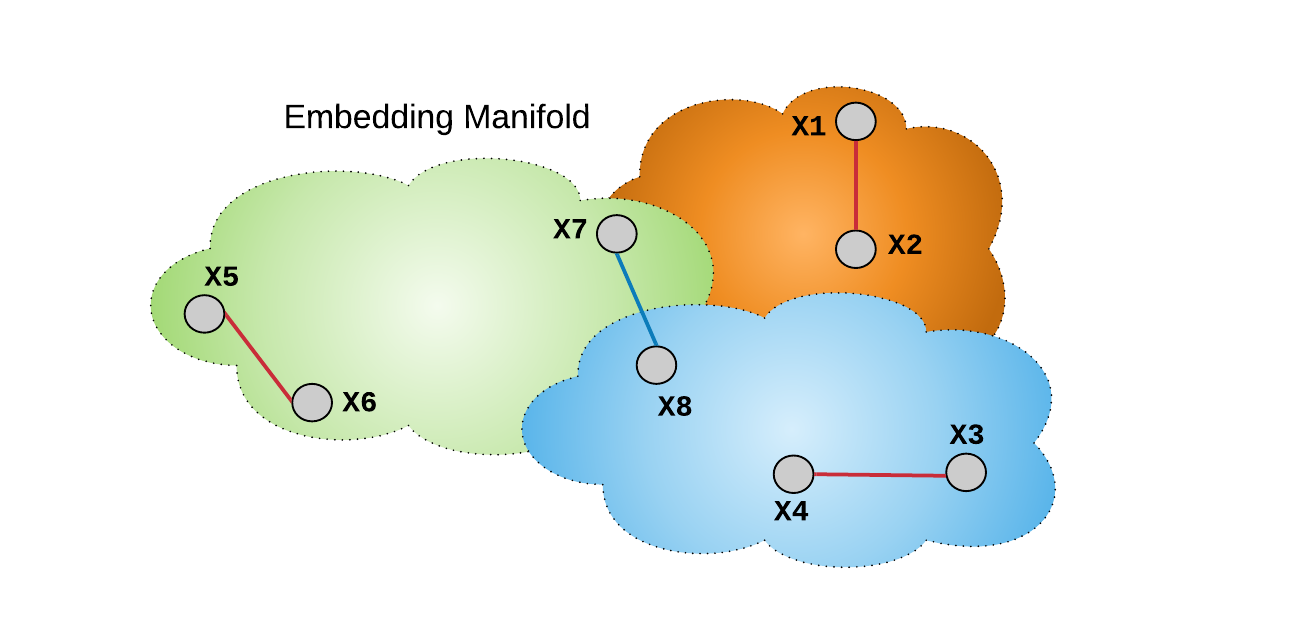
图:红色线表示相似标签的样本对,通过 $D_{i,j}$来作用于损失函数,其表示类内差异性. 蓝色线表示不同标签的样本对,通过 $\alpha - D_{i,j}$ 生成损失函数,其表示类间差异性.
对于数据集,样本数为 $N$,为了计算每次迭代的损失,需要进行 O(N^2) 次成对距离计算. 如果 mini-batch 为 B 的SGD优化,则计算量是 O(B^2).
然而,如果从数据集中随机选取 mini-batch,可能会导致 mini-batch 内没有任何正样本对,因此将不能优化类内差异性. 因此,每个 mini-batch 的正样本对数量的选择是很有必要的,最好接近 50% 的优化类内差异性,50% 的优化类间差异性.
例如,如果设置 mini-batch B=32,则,
[1] - 首先,随机选择 16 款产品;
[2] - 然后,从16款产品的每一款随机选择 2 张图片;
[3] - 则,在 mini-batch B=32时,生成得到了 16 个正样本对,15*16 个负样本对.
这种精心挑选 mini-batch 的处理,能够保证损失函数学习到类内差异性,而不增加额外的计算量.
尽管对比损失函数非常简单易理解,但,当设置距离间隔 $\alpha$ 时,并不能解决所有负样本对的视觉不相似性的程度. 例如,产品 A、产品B和产品C 的三张图片,如下图. 直观上,产品 A 和 产品 B 的视觉相似性比产品 A 和产品 C 的视觉相似性更高. 然而,当设置常数 $\alpha$ 时,当假设他们具有相似的视觉不相似性时,会将产品 B 和产品 C 的特征向量远离产品 A 的特征.
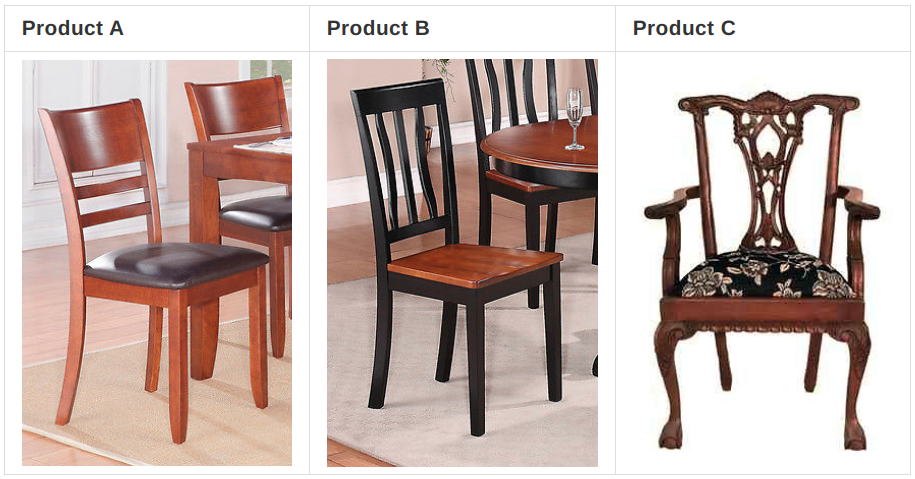
图:产品A和产品B是具有不同产品标签的视觉相似性;产品 C 是视觉上完全与产品A和产品B都不相同. 虽然具有不同尺度的视觉相似性,但 $\alpha$ 对于三款产品都是一个常数.
2. Triplet Loss(三元损失)
三元损失是度量学习中最常用的损失函数.
三元损失采用深度特征的三元组 $(x_{ia},x_{ip}, x_{in})$,其中,$(x_{ia}, x_{ip})$ 是具有相似产品标签的正样本对,$(x_{ia}, x_{in})$ 是不相似产品标签的负样本对.
网络训练的目标是,anchor $(x_{ia})$ 和正样本 positive $(x_{ip})$ 之间的距离 $D_{ia, ip}$ 小于 anchor $(x_{ia})$ 和负样本 negative $(x_{in})$ 之间的距离 $D_{ia, in}$,设定最小距离间隔 $\alpha$.
如图:
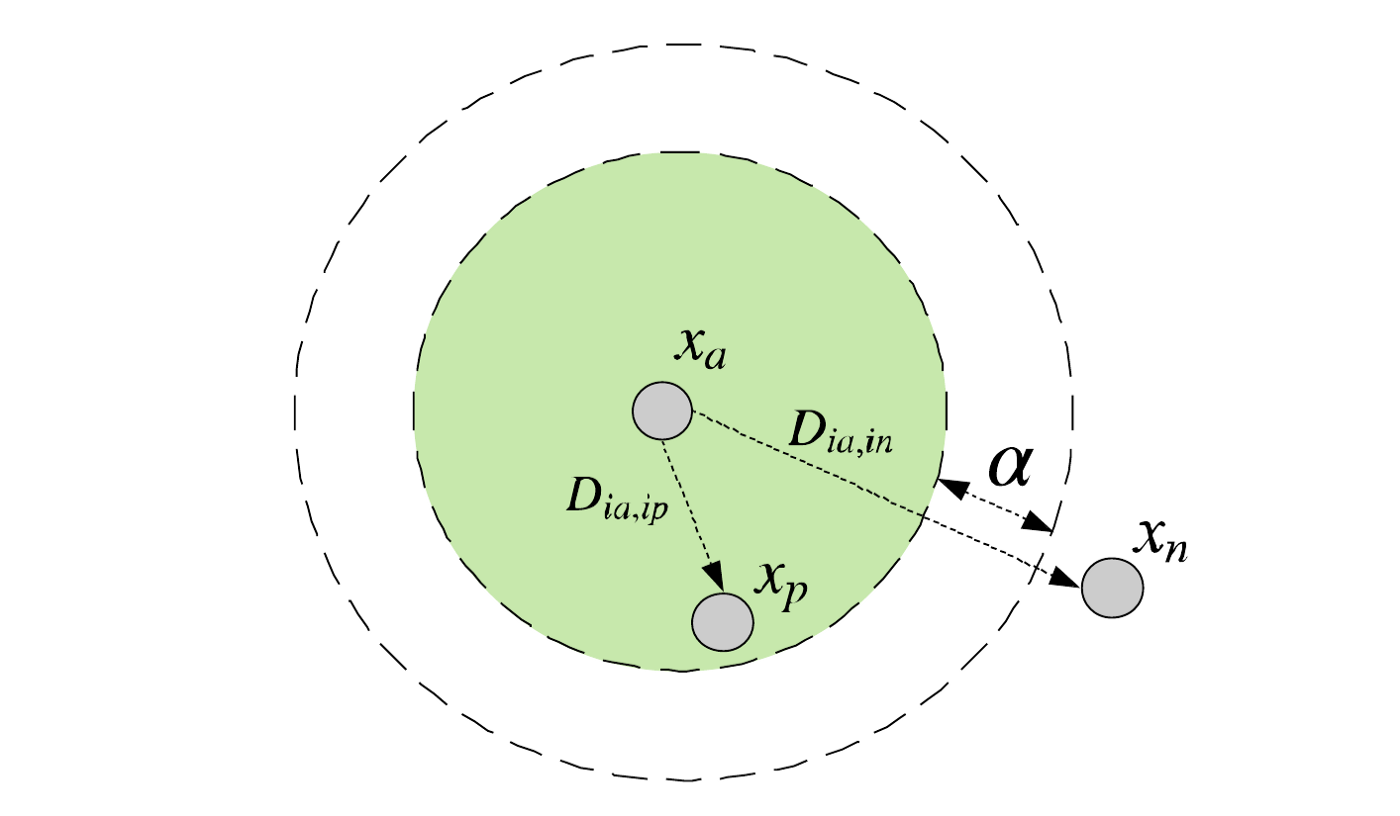
三元损失函数公式定义如:
$$ L = \frac{3}{2m} \sum_{i}^{m/3} [D_{ia, ip}^2 - D_{ia, in}^2 + \alpha]_+ $$
其中,$D_{ia, ip} = ||f(x_{ia}) - f(x_{ip})||_2$,$D_{ia, in} = ||f(x_{ia}) - f(x_{in})||_2$. 每个损失函数项分别考虑一个三元组,相对于预定义的 anchor 样本,以计算损失函数. 如图:
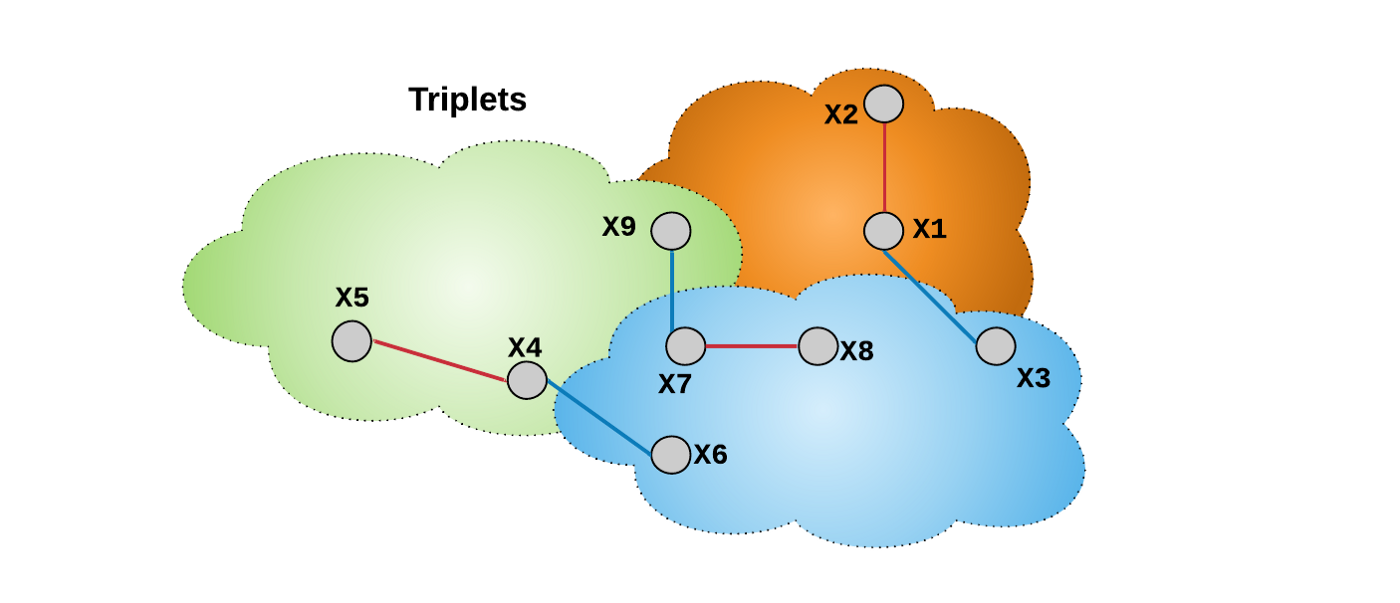
图:三元组 (X1, X2, X3),红色线连接 anchor 样本 X1 和正样本 X2. 蓝色线连接 anchor 样本 X1 和负样本 X3. 与对比损失不同的是,三元损失的每个损失函数项同时处理类内差异性和类间差异性.
由于损失函数中 margin $\alpha$ 并不是直接根据两个嵌入特征之间的距离的,而是根据三元组内关于 anchor 的样本对间的相对距离,因此,相比于对比损失函数,三元损失函数可以将任意嵌入空间形变考虑在内.
尽管三元损失能够解决对比损失函数的问题,但其计算量是比较大的. 对于 minibatch B 个三元组的训练,需要计算minibatch 内所有可能的三元组之间的距离,其有超过 O(N^3) 组可能的三元组,对于大规模数据集的训练,其计算量是巨大的.
例如,数据集有 20 个不同的产品类,每个产品包含 15 张图片,可以从 15 张图片中选取 2 张,进行 20 次组合,共 ((15x14)/2)x20= 2100 个有效三元组(2100 个可能的 anchor-positive 样本对,每个从数据集中选择一个负样本). 计算损失函数时,其需要 2100/m (m 为 mini-batch 大小) 次迭代.
此外,随着训练的收敛,大多数三元组都满足正样本对和负样本对之间的距离 margin 约束.导致大部分三元组对损失函数贡献很小,使得学习缓慢,训练收敛缓慢.
对于训练慢的问题,一般采用基于 semi-hard 和 hard 负样本挖掘的训练策略.
3. Lifted Structure Loss
当采用三元损失作为目标函数进行模型训练时,其并不能充分利用 mini-batch 内的样本信息,主要是因为给定 anchor 样本的正样本和负样本是预先定义的.
Lifted structure loss 的思想是,采用所有的 O(B^2) 样本对,而不是 O(B) 个独立的样本对,来提升 mini-batch 的优化. 如图:
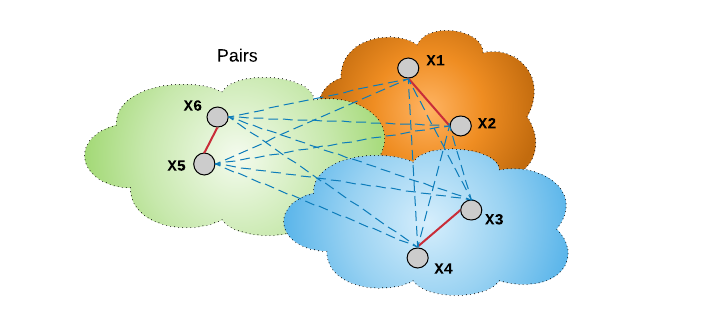
图:anchor 和正样本对 (X1, X2),以及mini-batch 内的其余样本对的连接.
Lifted structure loss 中,样本对的节点是分别与 mini-batch 内所有负样本节点进行连接的. 与三元损失函数不同之处是,其不需要通过预定义 anchor 来定义负样本,而忽略了 mini-batch 内所有的其他可用的负样本. Lifted structure loss 将每个正样本看作是一个 anchor,并寻找其负样本,以计算损失函数. 其有助于网络训练的速度更快,收敛性更好.
需要特别注意的是,从 mini-batch 样本中随机徐娜则负样本,例如图中的给定样本对 X1和X2,其并没有和 hard 负样本一样,推动网络的快速收敛. 为了提升收敛速度,作者建议,对于给定样本对的每个样本分别挖掘其 hard 负样本,如下图:
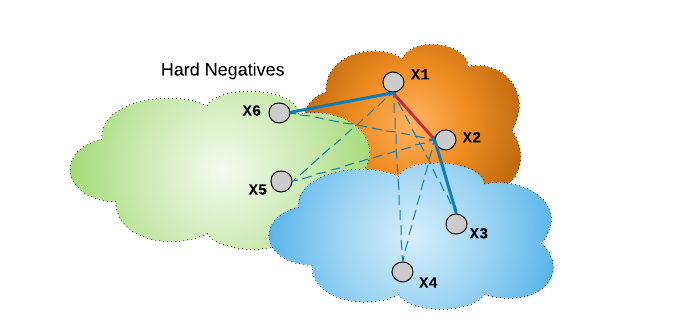
图:蓝色实线表示 X1 和 X2 的 hard 负样本. 尽管 X1 将 X6 考虑为负样本,其仍与 mini-batch 内的所有负样本连接.
Lifted struceture loss 函数最小化平滑上界,以稳定网络训练. 具体来说,其定义如:
$$ L_{i,j} = log(\sum_{(i, k) \in N} e^{(\alpha - D_{i,k})} + \sum_{(i, l) \in N}e^{(\alpha - D_{j, l})} ) + D_{i,j} $$
$$ L = \frac{1}{2|P|} \sum_{(i, j) \in P} max(0, L_{i,j})^2 $$
其中,$D_{i,j} = ||f(x_i) - f(x_j)||_2$.
$P$ 和 $N$ 分别表示 mini-batch 内所有的正样本对和负样本对.
4. N-Pair Loss
Multi-class N-pair loss 类似于 Lifted Structure loss,其在计算 mini-batch 的损失函数值时利用了多个负样本,且并不像三元损失和对比损失一样收敛速度变慢. 如图.
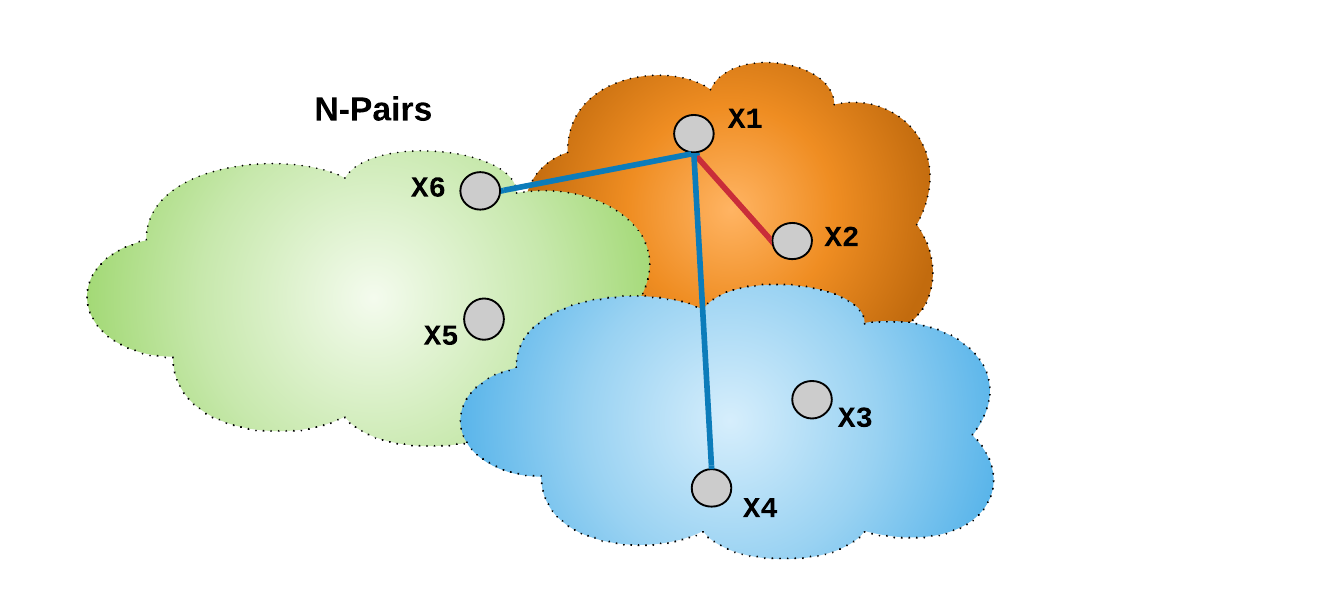
图:对于损失函数 L 中的每一项,给定样本对 (X1, X2) 中的 anchor 样本 X1 利用了 mini-batch 内的 N-1 个负样本(图中是 X4和 X6),其中,N 是mini-batch 内样本对数.
采用 N 个样本对计算损失函数的公式如:
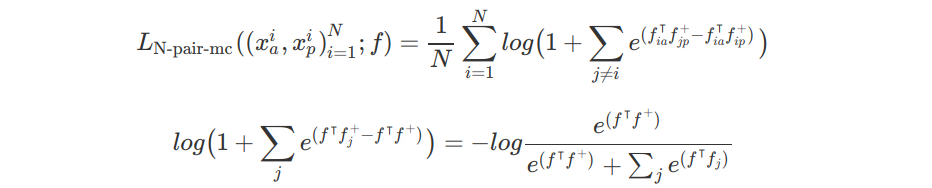
其中,$N$ 为相似标签的图片对的数量.
假设,$f$ 为特征向量,$f^+$ 为权重向量,公式右边的分母作为似然函数 $P(y=y+)$.
上述公式类似于 multi-class logistic loss(如,softmax loss).
此外,N-pair loss 函数对于训练数据集包含大量的产品标签时,效果更优. 不同样本对的数量 N 的值越大,则逼近的精度越高.
N-pair loss 相比于 Lifted Structure loss 的一个优势在于,其尝试以概率方式计算正样本对和负样本对的余弦(cos)相似性. 换句话说,N-pair loss 计算一对特征之间的余弦相似性,采用 mini-batch 的成对比较,提升属于相同标签的特征的概率. 由于余弦相似性度量(即概率) 具有尺度不变形,如下图,N-pair loss 在训练时具有对特征变化的鲁棒性.
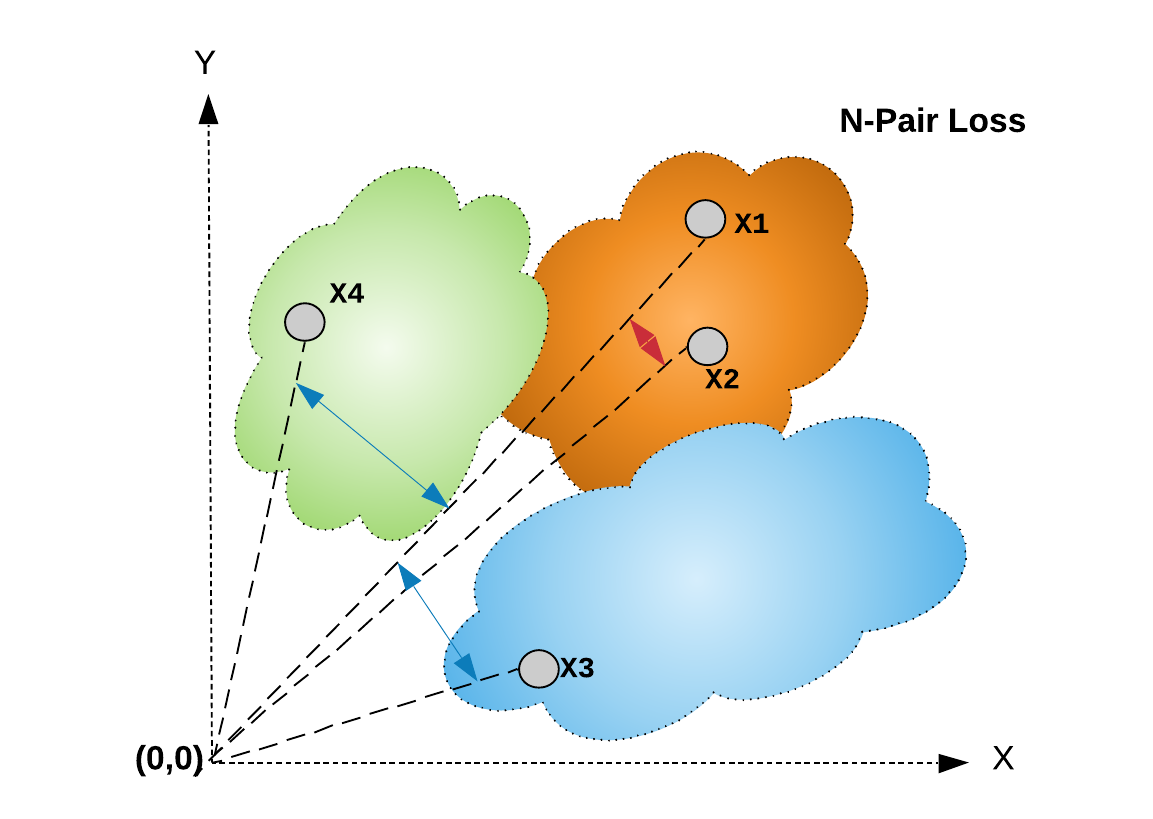
图:N-pair loss 直接计算 anchor X1 和正样本 X2 之间的余弦相似性,并以概率方式比较其和正样本和其余负样本之间的相似性.
5. Angular Loss
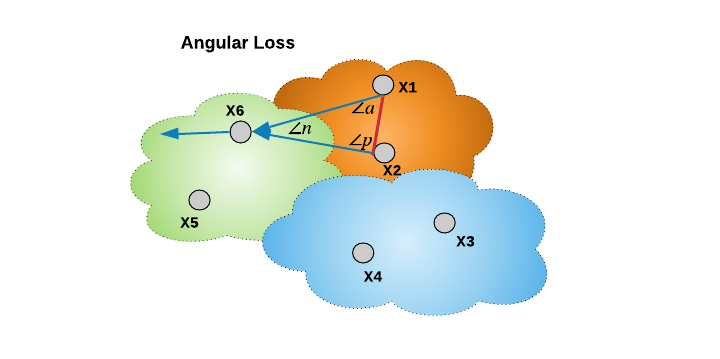
相比于上面提到的度量学习方法,主要是关注于优化绝对距离(对比损失),或相对距离(三元损失、Lifted Structure Loss、N-Pair loss),Angular loss提出根据三元三角内的关于负样本边的角度的三阶关系进行编码(Angular loss proposes to encode a third-order relation inside the triplet triangle in terms of an angle at the negative edge).
类似于 N-pair loss,Angular loss 通过定义角度距离(余弦距离)的损失函数,具有尺度不变形. 其将负样本特征向量拉离正样本聚类,将正样本特征向量推向彼此,如图:
Angular loss 的几个有点在于:
[1] - 不同于欧式距离,角度距离(余弦距离) 是平移不变相似性度量. 当考虑几何角度时,不仅受益于尺度不变性,还引入了旋转不变性. 即使在训练时,图像特征尺度变化比较频繁,对于固定的 margin $\alpha$,$\ang n \le \alpha$ 往往是满足的. 简而言之,损失函数中的几何角度视角对于特征图的局部变化更加鲁棒.
[2] - 余弦规则解释了 $\ang n$ 的计算需要三元组的所有三个边. 而原来的三元组仅考虑了两个边. 新增的约束有利于优化的鲁棒性和有效性.
[3] - 当采用欧式距离时,对于损失函数来说,损失margin m 的选择不是一项直观的任务. 主要是因为,随着数据集大小的增长,目标标签的类内变化会比较大. 该超参数的调参至关重要. 相比而言,由于其尺度不变性,设置 $\alpha$ 就简单很多.
此外,angular loss 易于与传统度量学习损失函数相结合,以提升整体表现. 例如:
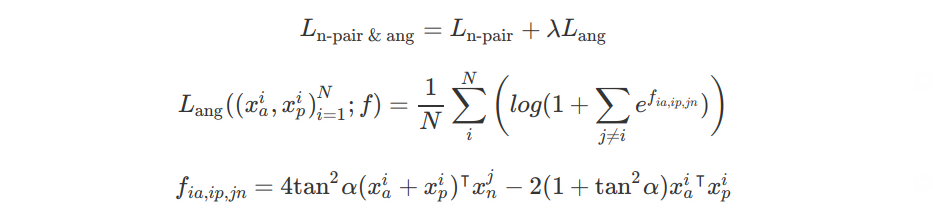
其中,$\lambda$ 是 N-pair loss 和 angular loss 的权重参数. 默认 $\lambda =2$,$\alpha$ 一般设置为 35-60 度.
6. Divergence Loss
尽管上述度量学习目标函数,可以将给定图像映射到嵌入流形里,但他们并不一定能顾及到相同图片的各个方面. Divergence loss 通过不同的组合模块来探索这一方面.
Divergence loss 是一个正则项,可以将其添加到度量学习损失函数,以联合监督. 其增加不同组合模块学习到的图像特征之间的距离. 换句话说,其鼓励每个模块去学习输入图像的不同属性,公式如,
$$ L(x_i, y_i) = \sum_m L_{1, (m)} (x_i, y_i) + \lambda L_2(x_i) $$
其中,$(x_i, y_i)$ 是所有训练样本和标签的集合. $L_1$ 是第 m 个模块的度量学习损失函数,$L_2$ 是每个模块 m 的特征嵌入多样性的正则项. $\lambda$ 是权重参数,以控制不同的正则子.
$$ L_2(x) = \sum_i \sum_{a, p} [m - D_{ia, ip}^2]_+ $$
其中,$x_i$ 是对应于图像 $x$ 的特征向量. $D_{ia, ip}$ 表示两个不同的学习模块 $a$ 和 $p$ 得到的图像特征向量之间的距离. $m$ 是 divergence loss 的 margin,一般设为 1. $[.]^+$ 表示 hinge 函数 $max(0, .)$.
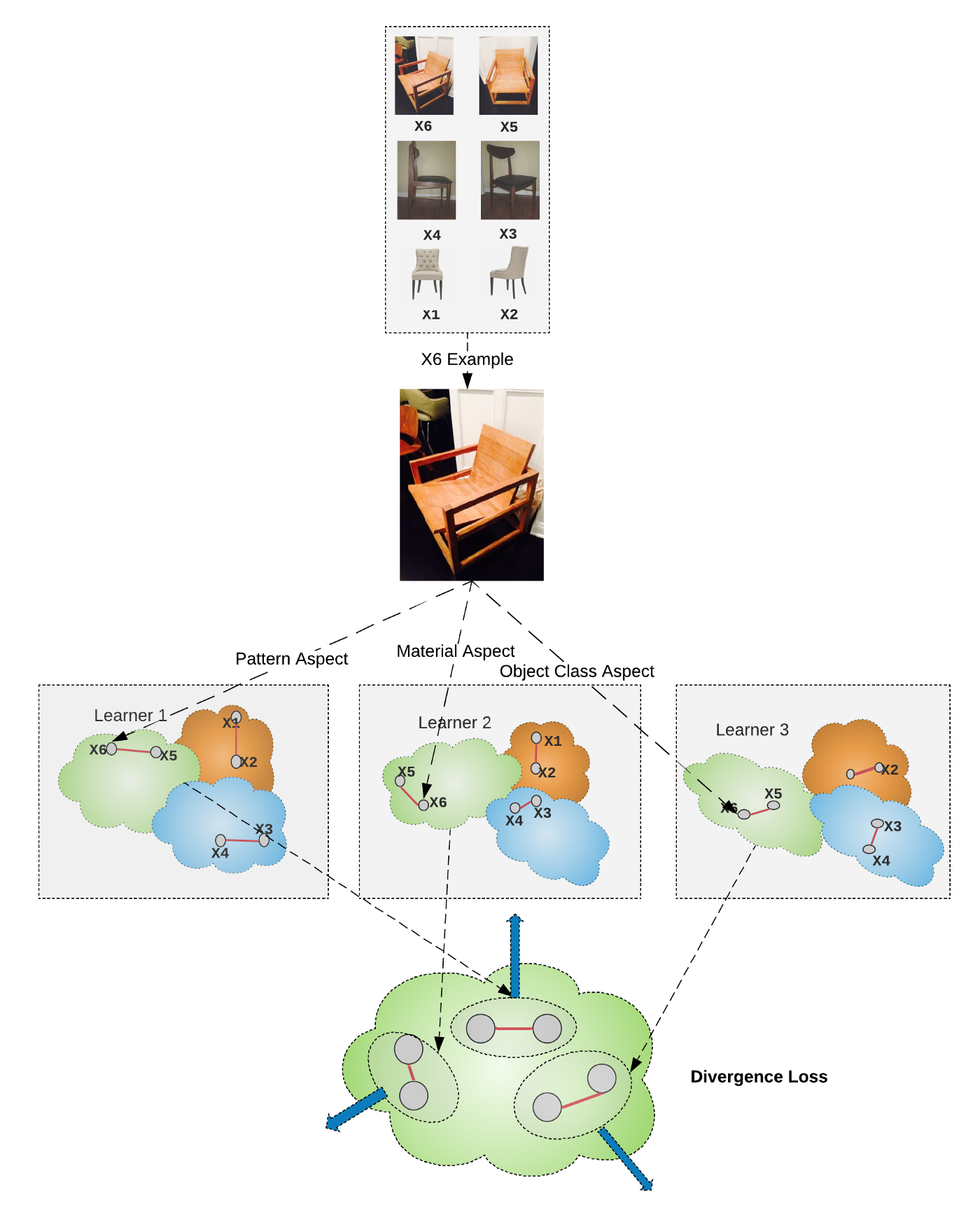
图:Divergence loss 将不同学习子模块的特征向量互相拉远. 换句话说,其鼓励通过不同学习子模块得到的特征向量,关注于啊图像的不同部分(图中 X6). 这样就可以得到多个学习子模块的多样性嵌入空间. 每个学习子分别满足将相似标签在嵌入空间临近的相似性约束.
7. 总结
这里简单汇总讨论了度量学习损失函数,其在深度度量学习网络训练中具有至关重要的作用.
然而,尽管基于这些损失函数的网络已经在视觉搜索中取得了很大成功,但深度度量学习网络的训练是计算量非常大且耗时的. 如,对于大小为 N 的数据集,梯度计算量为 O(N^2) 或 O(N^3),因此需要梯度下降中,需要严格限制 mini-batch (B). 其可以将计算量降低到 O(B^2) 或 O(B^3),不过,如何选取 mini-batch 将会非常重要.
SGD 计算时,通过随机采样数据集和适当的 batchsize 来构建 minibatch. 然而, 例如,如果在三元损失函数中,采用随机采样来构建 mini-batches,很有可能在最后没有任何正样本对或负样本对,导致其梯度非常小. 因此,在 mini-batch 梯度处理中,虽然可以通过 mini-batch 降低计算量,但是如果 mini-batches 的损失贡献小,则有可能需要更多计算量,以达到最优的点. 因此,训练数据集的采样和minibatch的构建策略,使其能够对损失函数包含充分的信息,而又不要太大,对于加快度量学习网络的训练至关重要.
参考
[1] Hadsell, R., Chopra, S., & LeCun, Y. (2006, June). Dimensionality reduction by learning an invariant mapping. In 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06) (Vol. 2, pp. 1735–1742). IEEE.
[2] Wen, Y., Zhang, K., Li, Z., & Qiao, Y. (2016, October). A discriminative feature learning approach for deep face recognition. In European conference on computer vision (pp. 499–515). Springer, Cham.
[3] Schroff, F., Kalenichenko, D., & Philbin, J. (2015). Facenet: A unified embedding for face recognition and clustering. In Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 815–823).
[4] Oh Song, H., Xiang, Y., Jegelka, S., & Savarese, S. (2016). Deep metric learning via lifted structured feature embedding. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (pp. 4004–4012).
[5] Sohn, K. (2016). Improved deep metric learning with multi-class n-pair loss objective. In Advances in Neural Information Processing Systems (pp. 1857–1865).
[6] Wang, J., Zhou, F., Wen, S., Liu, X., & Lin, Y. (2017). Deep metric learning with angular loss. In Proceedings of the IEEE International Conference on Computer Vision (pp. 2593–2601).
[7] Kim, W., Goyal, B., Chawla, K., Lee, J., & Kwon, K. (2018). Attention-based ensemble for deep metric learning. In Proceedings of the European Conference on Computer Vision (ECCV) (pp. 736–751).
1 条评论
What is the main purpose of deep metric learning in the context of applications such as visual search engines?
Regard Prtal Berita