- 1D CNN,kernel 在 1 个方向移动,输入和输出是 2 维的,通常用于时序(Time-Series)数据
- 2D CNN,kernel 在 2 个方向移动,输入和输出是 3 维的,通常用于图像数据
- 3D CNN,kernel 在 3 个方向移动,输入和输出是4 维的,通用用于 3D 图像数据
1D 卷积 - Conv1D
Conv1D,kernel 沿着一个维度进行滑动.
比如,时间序列数据,如图:
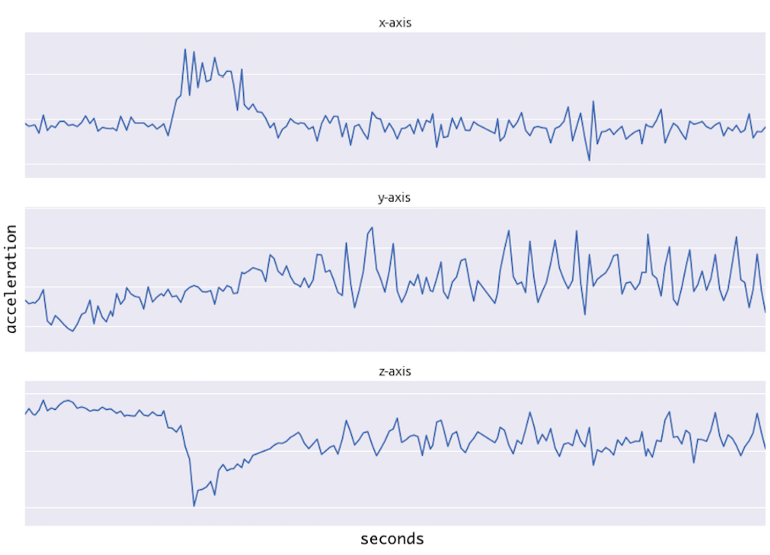
图:从传感器(accelerometer)获得的时间序列数据
以人体穿戴在胳膊上的传感器所采集到的时序数据为例. 数据从 3 个轴表示,1D CNN 可以从传感器数据进行行为识别任务分析,如,人站立、行走、跳等. 该数据有 2 维,第一维是time-steps,另一个是在 3 个轴方向上的传感器值.
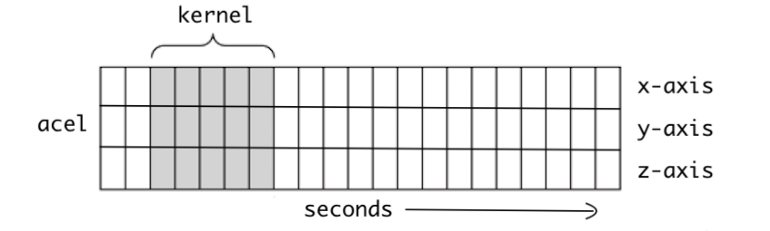
kernel 在传感器数据上滑动的方式如下图,每一行表示某一轴的时间序列传感器数据. kernel仅能在时间轴方向上移动.
'''
https://pytorch.org/docs/stable/generated/torch.nn.Conv1d.html
'''
import torch
from torch import nn
model = nn.Conv1d(in_channels=1, out_channels=10, kernel_size=5, stride=1)
input = torch.randn(20, 1, 50)
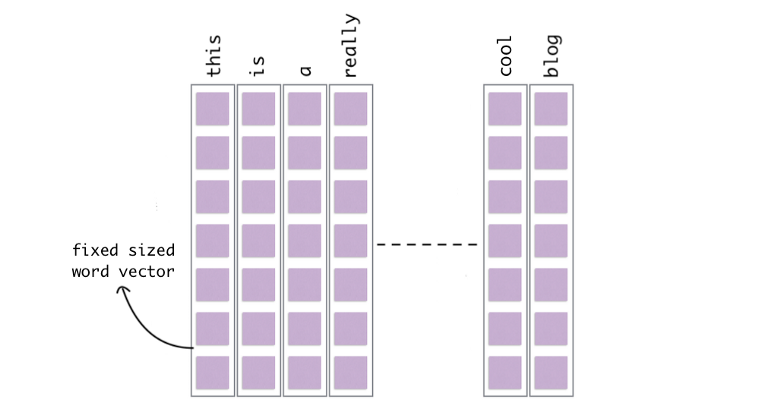
output = model(input)1D CNNs 被普遍应用于传感器数据,还可以用于音频和文本数据,因为其可以被表示为时序数据. 如图:
2D 卷积 - Conv2D
Lenet-5 结构中首先提出标准CNN网络. Conv2D 普遍应用于图像数据. 其 2D 是因为,kernel 沿着数据的两个维度进行滑动,如图:
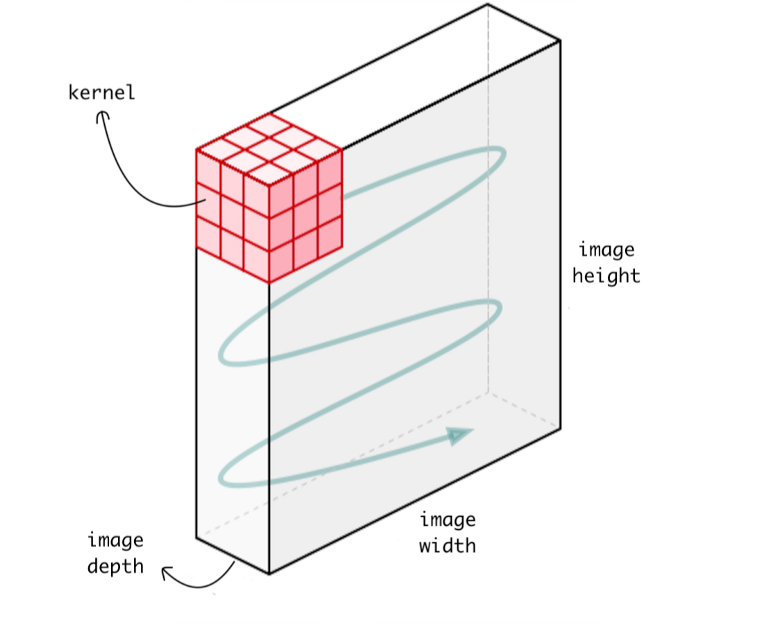
CNN 的优势在于,采用 kernel 可以提取数据的空间特征. 例如,CNN 可以检测边缘、颜色分布等,其有助于网络对于图像分类的鲁棒性.
'''
https://pytorch.org/docs/stable/generated/torch.nn.Conv2d.html
'''
import torch
from torch import nn
# With square kernels and equal stride
model = nn.Conv2d(16, 33, 3, stride=2)
# non-square kernels and unequal stride and with padding
model = nn.Conv2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2))
# non-square kernels and unequal stride and with padding and dilation
model = nn.Conv2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2), dilation=(3, 1))
input = torch.randn(20, 16, 50, 100)
output = model(input)3D 卷积 - Conv3D
3D CNN 中,kernel 沿 3 个维度滑动,如图:
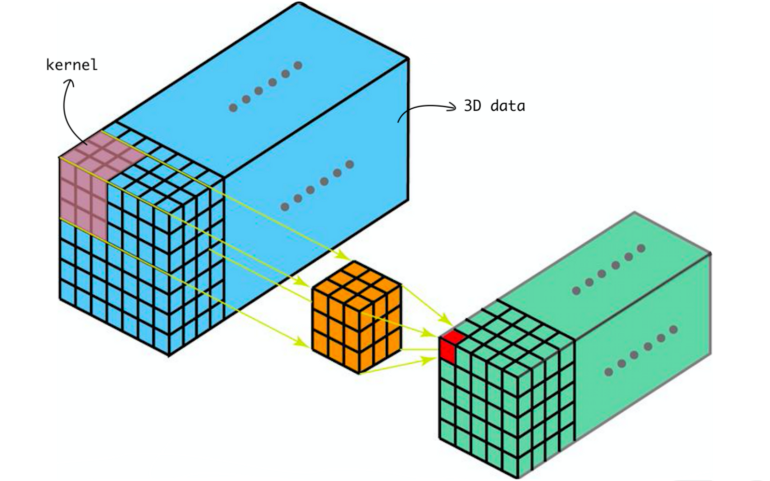
Conv3D 通常应用于 3D图像数据,如,MRI (Magnetic Resonance Imageing) 数据、CT(Computerized Tomography)扫描数据等.
'''
https://pytorch.org/docs/stable/generated/torch.nn.Conv3d.html
'''
import torch
from torch import nn
# With square kernels and equal stride
model = nn.Conv3d(16, 33, 3, stride=2)
# non-square kernels and unequal stride and with padding
model = nn.Conv3d(16, 33, (3, 5, 2), stride=(2, 1, 1), padding=(4, 2, 0))
input = torch.randn(20, 16, 10, 50, 100)
output = model(input)