https://github.com/L1aoXingyu/pytorch-beginner/blob/master/08-AutoEncoder
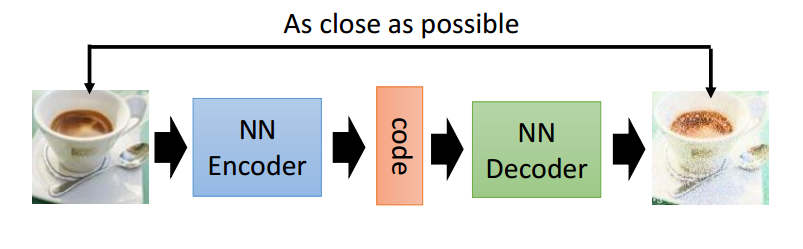
AutoEncoder
#!/usr/bin/python3
#!--*-- coding: utf-8 --*--
import os
import torch
import torchvision
from torch import nn
from torch.autograd import Variable
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision.datasets import MNIST
from torchvision.utils import save_image
if not os.path.exists('./mlp_img'):
os.mkdir('./mlp_img')
def to_img(x):
x = 0.5 * (x + 1)
x = x.clamp(0, 1)
x = x.view(x.size(0), 1, 28, 28)
return x
#
num_epochs = 100
batch_size = 128
learning_rate = 1e-3
img_transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])
])
dataset = MNIST('./data', transform=img_transform)
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
class autoencoder(nn.Module):
def __init__(self):
super(autoencoder, self).__init__()
self.encoder = nn.Sequential(
nn.Linear(28 * 28, 128),
nn.ReLU(True),
nn.Linear(128, 64),
nn.ReLU(True), nn.Linear(64, 12), nn.ReLU(True), nn.Linear(12, 3))
self.decoder = nn.Sequential(
nn.Linear(3, 12),
nn.ReLU(True),
nn.Linear(12, 64),
nn.ReLU(True),
nn.Linear(64, 128),
nn.ReLU(True), nn.Linear(128, 28 * 28), nn.Tanh())
def forward(self, x):
x = self.encoder(x)
x = self.decoder(x)
return x
#
model = autoencoder().cuda()
criterion = nn.MSELoss()
optimizer = torch.optim.Adam(
model.parameters(), lr=learning_rate, weight_decay=1e-5)
for epoch in range(num_epochs):
for data in dataloader:
img, _ = data
img = img.view(img.size(0), -1)
img = Variable(img).cuda()
# ===================forward=====================
output = model(img)
loss = criterion(output, img)
# ===================backward====================
optimizer.zero_grad()
loss.backward()
optimizer.step()
# ===================log========================
print('epoch [{}/{}], loss:{:.4f}'
.format(epoch + 1, num_epochs, loss.data[0]))
if epoch % 10 == 0:
pic = to_img(output.cpu().data)
save_image(pic, './mlp_img/image_{}.png'.format(epoch))
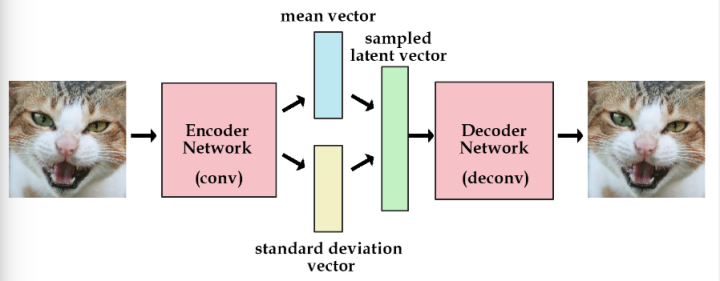
torch.save(model.state_dict(), './autoencoder.pth')Variational_AutoEncoder
#!/usr/bin/python3
#!--*-- coding: utf-8 --*--
import torch
import torchvision
from torch import nn
from torch import optim
import torch.nn.functional as F
from torch.autograd import Variable
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision.utils import save_image
from torchvision.datasets import MNIST
import os
if not os.path.exists('./vae_img'):
os.mkdir('./vae_img')
def to_img(x):
x = x.clamp(0, 1)
x = x.view(x.size(0), 1, 28, 28)
return x
num_epochs = 100
batch_size = 128
learning_rate = 1e-3
img_transform = transforms.Compose([
transforms.ToTensor()
# transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
])
dataset = MNIST('./data', transform=img_transform, download=True)
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
class VAE(nn.Module):
def __init__(self):
super(VAE, self).__init__()
self.fc1 = nn.Linear(784, 400)
self.fc21 = nn.Linear(400, 20)
self.fc22 = nn.Linear(400, 20)
self.fc3 = nn.Linear(20, 400)
self.fc4 = nn.Linear(400, 784)
def encode(self, x):
h1 = F.relu(self.fc1(x))
return self.fc21(h1), self.fc22(h1)
def reparametrize(self, mu, logvar):
std = logvar.mul(0.5).exp_()
if torch.cuda.is_available():
eps = torch.cuda.FloatTensor(std.size()).normal_()
else:
eps = torch.FloatTensor(std.size()).normal_()
eps = Variable(eps)
return eps.mul(std).add_(mu)
def decode(self, z):
h3 = F.relu(self.fc3(z))
return F.sigmoid(self.fc4(h3))
def forward(self, x):
mu, logvar = self.encode(x)
z = self.reparametrize(mu, logvar)
return self.decode(z), mu, logvar
model = VAE()
if torch.cuda.is_available():
model.cuda()
reconstruction_function = nn.MSELoss(size_average=False)
def loss_function(recon_x, x, mu, logvar):
"""
recon_x: generating images
x: origin images
mu: latent mean
logvar: latent log variance
"""
BCE = reconstruction_function(recon_x, x) # mse loss
# loss = 0.5 * sum(1 + log(sigma^2) - mu^2 - sigma^2)
KLD_element = mu.pow(2).add_(logvar.exp()).mul_(-1).add_(1).add_(logvar)
KLD = torch.sum(KLD_element).mul_(-0.5)
# KL divergence
return BCE + KLD
optimizer = optim.Adam(model.parameters(), lr=1e-3)
for epoch in range(num_epochs):
model.train()
train_loss = 0
for batch_idx, data in enumerate(dataloader):
img, _ = data
img = img.view(img.size(0), -1)
img = Variable(img)
if torch.cuda.is_available():
img = img.cuda()
optimizer.zero_grad()
recon_batch, mu, logvar = model(img)
loss = loss_function(recon_batch, img, mu, logvar)
loss.backward()
train_loss += loss.data[0]
optimizer.step()
if batch_idx % 100 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch,
batch_idx * len(img),
len(dataloader.dataset), 100. * batch_idx / len(dataloader),
loss.data[0] / len(img)))
print('====> Epoch: {} Average loss: {:.4f}'.format(
epoch, train_loss / len(dataloader.dataset)))
if epoch % 10 == 0:
save = to_img(recon_batch.cpu().data)
save_image(save, './vae_img/image_{}.png'.format(epoch))
torch.save(model.state_dict(), './vae.pth')Conv_AutoEncoder
#!/usr/bin/python3
#!--*-- coding: utf-8 --*--
import torch
import torchvision
from torch import nn
from torch.autograd import Variable
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision.utils import save_image
from torchvision.datasets import MNIST
import os
if not os.path.exists('./dc_img'):
os.mkdir('./dc_img')
def to_img(x):
x = 0.5 * (x + 1)
x = x.clamp(0, 1)
x = x.view(x.size(0), 1, 28, 28)
return x
num_epochs = 100
batch_size = 128
learning_rate = 1e-3
img_transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5), (0.5))
])
dataset = MNIST('./data', transform=img_transform)
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
class autoencoder(nn.Module):
def __init__(self):
super(autoencoder, self).__init__()
self.encoder = nn.Sequential(
nn.Conv2d(1, 16, 3, stride=3, padding=1), # b, 16, 10, 10
nn.ReLU(True),
nn.MaxPool2d(2, stride=2), # b, 16, 5, 5
nn.Conv2d(16, 8, 3, stride=2, padding=1), # b, 8, 3, 3
nn.ReLU(True),
nn.MaxPool2d(2, stride=1) # b, 8, 2, 2
)
self.decoder = nn.Sequential(
nn.ConvTranspose2d(8, 16, 3, stride=2), # b, 16, 5, 5
nn.ReLU(True),
nn.ConvTranspose2d(16, 8, 5, stride=3, padding=1), # b, 8, 15, 15
nn.ReLU(True),
nn.ConvTranspose2d(8, 1, 2, stride=2, padding=1), # b, 1, 28, 28
nn.Tanh()
)
def forward(self, x):
x = self.encoder(x)
x = self.decoder(x)
return x
model = autoencoder().cuda()
criterion = nn.MSELoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate,
weight_decay=1e-5)
for epoch in range(num_epochs):
total_loss = 0
for data in dataloader:
img, _ = data
img = Variable(img).cuda()
# ===================forward=====================
output = model(img)
loss = criterion(output, img)
# ===================backward====================
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_loss += loss.data
# ===================log========================
print('epoch [{}/{}], loss:{:.4f}'
.format(epoch+1, num_epochs, total_loss))
if epoch % 10 == 0:
pic = to_img(output.cpu().data)
save_image(pic, './dc_img/image_{}.png'.format(epoch))
torch.save(model.state_dict(), './conv_autoencoder.pth')From: https://github.com/L1aoXingyu/pytorch-beginner/blob/master/08-AutoEncoder