论文:U^2-Net: Going Deeper with Nested U-Structure for Salient Object Detection - 2020
作者:Xuebin Qin, Zichen Zhang, Chenyang Huang, Masood Dehghan, Osmar R.Zaiane, MartinJagersand
团队:University of Alberta, Edmonton, Canada
Github - U-2-Net
U2Net,即U^2-Net(U square Net).
1. U2Net 网络结构
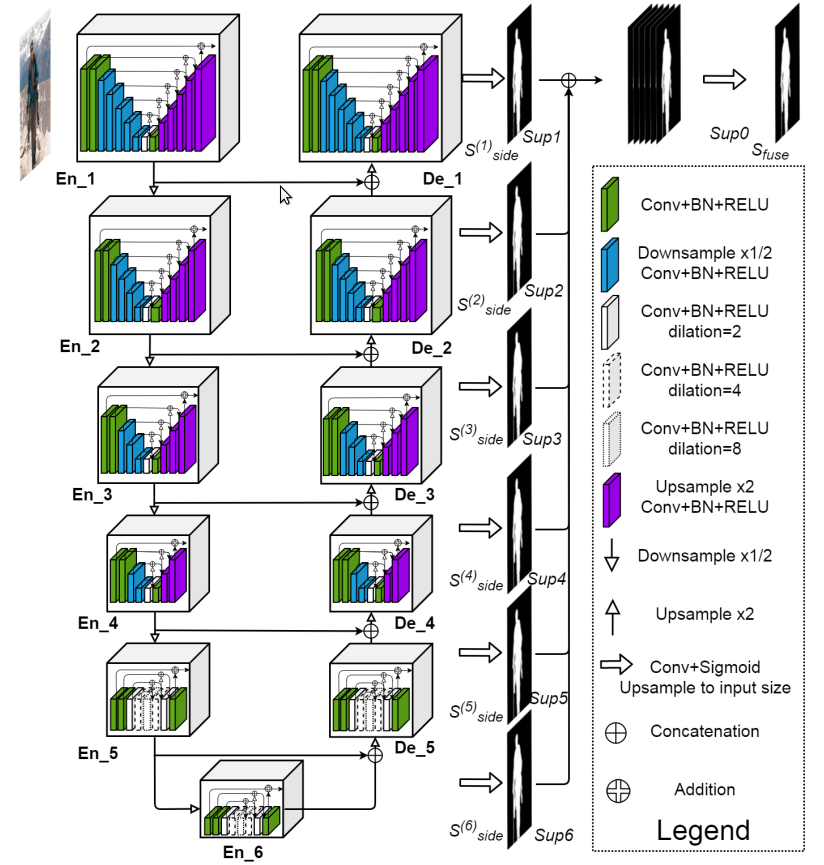
U2Net 网络结构如下图,其类似于编码-解码(Encoder-Decoder)结构的 U-Net. U2Net 每个 stage 由新提出的 RSU模块(residual U-block) 组成. 例如,En_1 即为基于 RSU 构建的.
其优势在于:
[1] - 提出 RSU 模块,融合不同尺寸接受野的特征,以捕获更多不同尺度的上下文信息(contextual information).
[2] - 基于 RSU 模块的 池化(pooling) 操作,在不显著增加计算成本的前提下,增加了整个网络结构的深度(depth).
1.1. RSU 模块
RSU, ReSidual Ublock, 用于捕获 intra-stage 的 multi-scales 特征. 其结构如图:
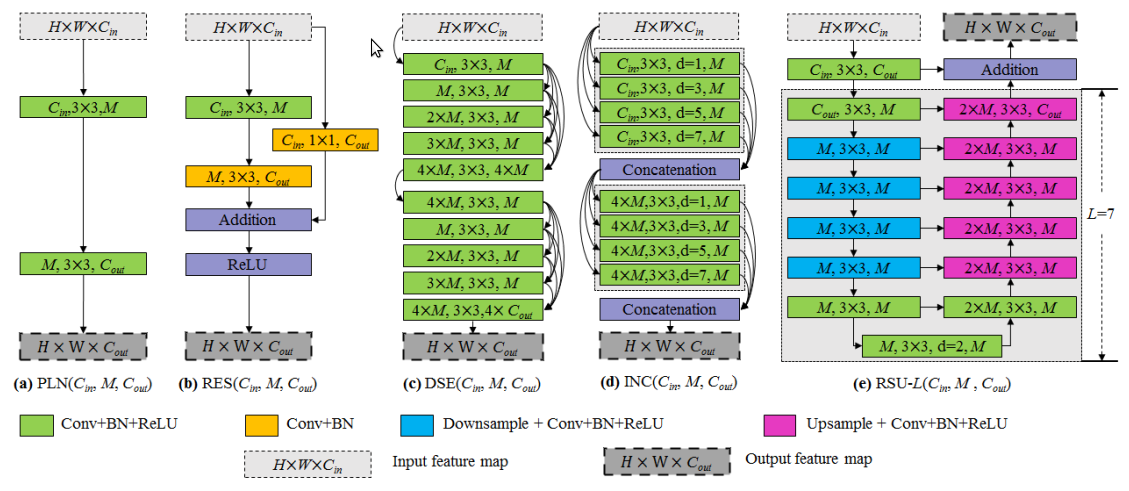
图: (a) Plain CNN, PLN. (b) Residual-like block, RES. (c) Dense-like block, DSE. (d) Inception-like block, INC. (e) Residual U-block, RSU.
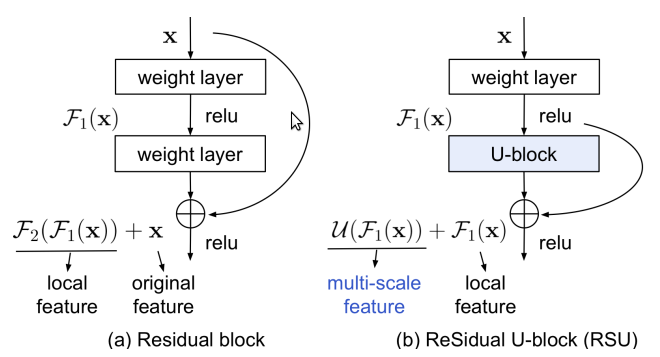
RSU 模块和 residual block 对比:
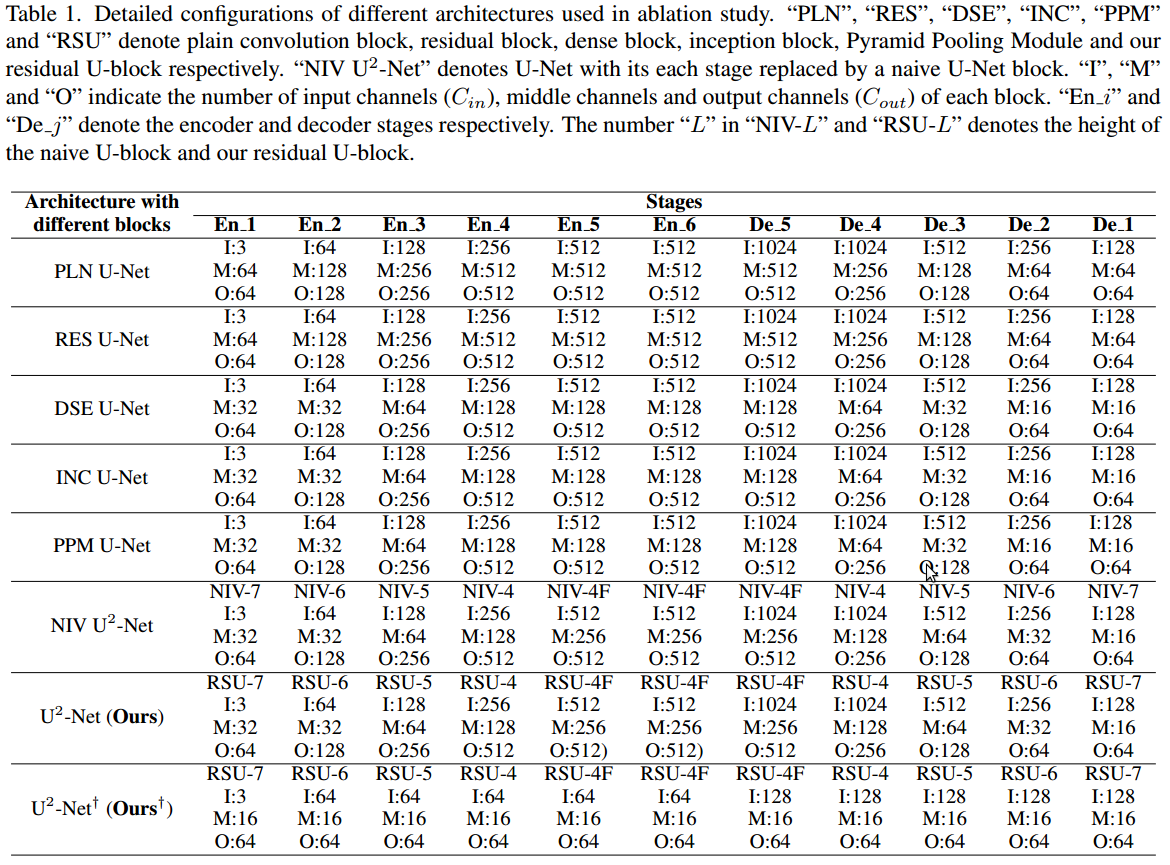
注:PPM, pyramdi pooling modules.
1.2. 损失函数
类似于论文 Holistically-nested edge detection(HED),U2Net 训练的损失函数定义为:
$$ \mathcal{L} = \sum_{m=1}^M w_{side}^{(m)} \mathcal{l}_{side}^{(m)} + w_{fuse}\mathcal{l}_{fuse} $$
其中,M=6, 为U2Net 的 Sup1, Sup2, ..., Sup6 stage.
$\mathcal{l}_{side}^{(m)}$ 为 Sup1, Sup2, ..., Sup6 输出的显著图(saliency map) $S_{side}^{(m)}$ 的损失函数.
$\mathcal{l} _{fuse}$ 为最终融合输出的显著图$S_{fuse}$ 的损失函数.
$w_{fuse}$ 为每个损失函数的权重.
对于每个 $\mathcal{l}$,采用标准的二值交叉熵损失函数:
$$ \mathcal{l} = - \sum_{(r, c)}^{(H, W)}[P_{G_{(r, c)}} log P_{S(r, c)} + (1 - P_{G(r, c)}) log(1 - P_{S(r, c)})] $$
其中,$(r, c)$ 为像素坐标;(H, W) 为图像尺寸,height 和 width.
$P_{G(r, c)}$ 和 $P_{S(r, c)}$ 分别表示 GT 像素值和预测的显著概率图(saliency probability map).
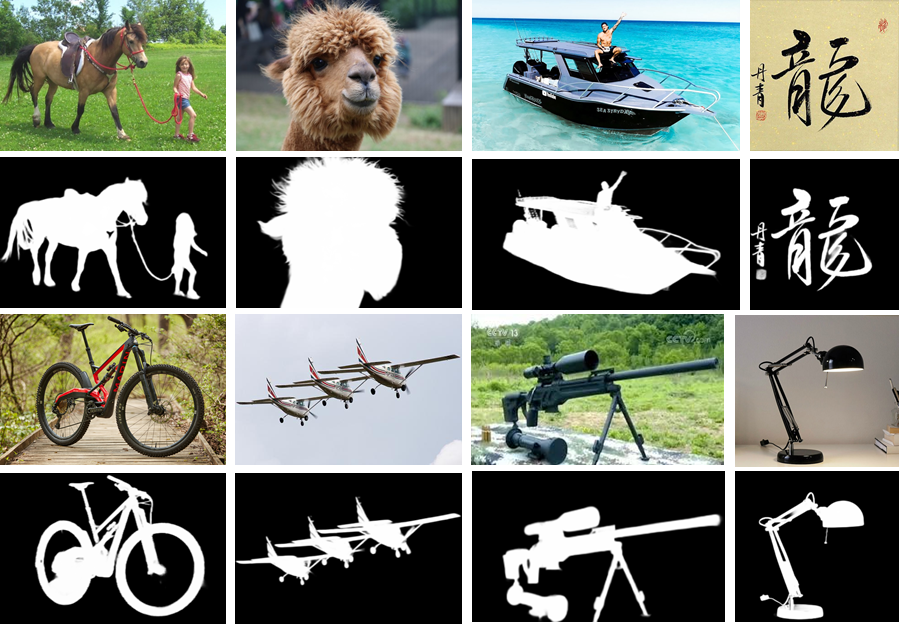
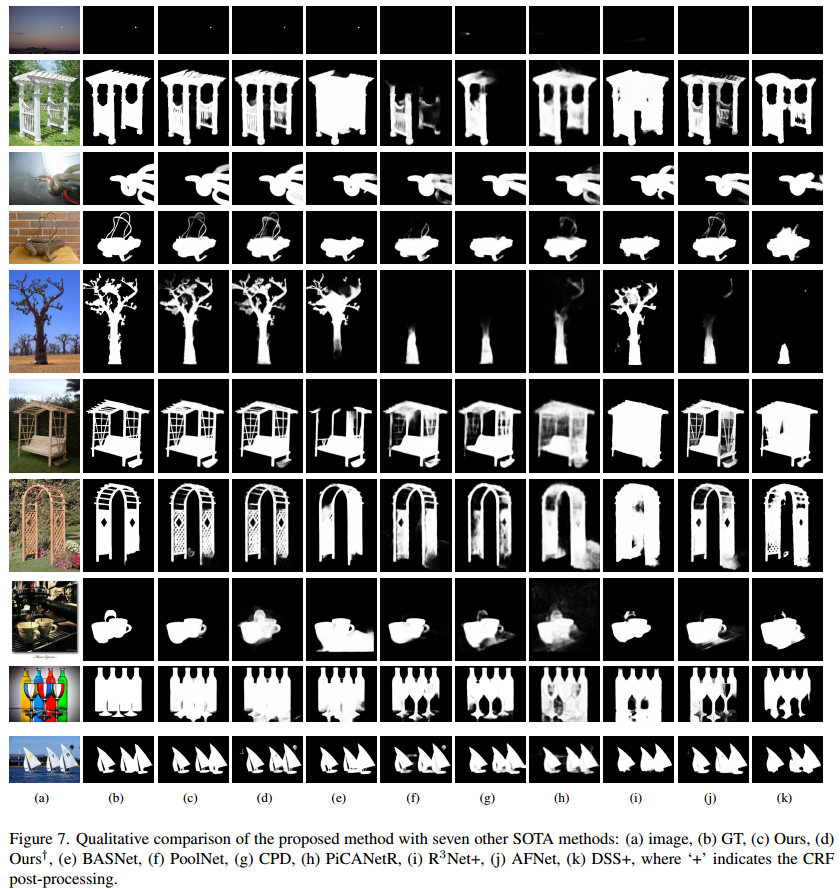
2. U2Net 输出结果可视化
U2Net的输出结果,如图:
3. U2Net 实现
Github - U-2-Net
3.1. U2Net 和 U2NetP
u2net.py:
import torch
import torch.nn as nn
from torchvision import models
import torch.nn.functional as F
class REBNCONV(nn.Module):
def __init__(self,in_ch=3,out_ch=3,dirate=1):
super(REBNCONV,self).__init__()
self.conv_s1 = nn.Conv2d(in_ch,out_ch,3,padding=1*dirate,dilation=1*dirate)
self.bn_s1 = nn.BatchNorm2d(out_ch)
self.relu_s1 = nn.ReLU(inplace=True)
def forward(self,x):
hx = x
xout = self.relu_s1(self.bn_s1(self.conv_s1(hx)))
return xout
## upsample tensor 'src' to have the same spatial size with tensor 'tar'
def _upsample_like(src,tar):
src = F.upsample(src,size=tar.shape[2:],mode='bilinear')
return src
### RSU-7 ###
class RSU7(nn.Module):#UNet07DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU7,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool4 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool5 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv6 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv7 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv6d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv5d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx = self.pool4(hx4)
hx5 = self.rebnconv5(hx)
hx = self.pool5(hx5)
hx6 = self.rebnconv6(hx)
hx7 = self.rebnconv7(hx6)
hx6d = self.rebnconv6d(torch.cat((hx7,hx6),1))
hx6dup = _upsample_like(hx6d,hx5)
hx5d = self.rebnconv5d(torch.cat((hx6dup,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.rebnconv4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-6 ###
class RSU6(nn.Module):#UNet06DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU6,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool4 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv6 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv5d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx = self.pool4(hx4)
hx5 = self.rebnconv5(hx)
hx6 = self.rebnconv6(hx5)
hx5d = self.rebnconv5d(torch.cat((hx6,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.rebnconv4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-5 ###
class RSU5(nn.Module):#UNet05DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU5,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx5 = self.rebnconv5(hx4)
hx4d = self.rebnconv4d(torch.cat((hx5,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-4 ###
class RSU4(nn.Module):#UNet04DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU4,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx4 = self.rebnconv4(hx3)
hx3d = self.rebnconv3d(torch.cat((hx4,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-4F ###
class RSU4F(nn.Module):#UNet04FRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU4F,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=4)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=8)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=4)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=2)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx2 = self.rebnconv2(hx1)
hx3 = self.rebnconv3(hx2)
hx4 = self.rebnconv4(hx3)
hx3d = self.rebnconv3d(torch.cat((hx4,hx3),1))
hx2d = self.rebnconv2d(torch.cat((hx3d,hx2),1))
hx1d = self.rebnconv1d(torch.cat((hx2d,hx1),1))
return hx1d + hxin
##### U^2-Net ####
class U2NET(nn.Module):
def __init__(self,in_ch=3,out_ch=1):
super(U2NET,self).__init__()
self.stage1 = RSU7(in_ch,32,64)
self.pool12 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage2 = RSU6(64,32,128)
self.pool23 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage3 = RSU5(128,64,256)
self.pool34 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage4 = RSU4(256,128,512)
self.pool45 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage5 = RSU4F(512,256,512)
self.pool56 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage6 = RSU4F(512,256,512)
# decoder
self.stage5d = RSU4F(1024,256,512)
self.stage4d = RSU4(1024,128,256)
self.stage3d = RSU5(512,64,128)
self.stage2d = RSU6(256,32,64)
self.stage1d = RSU7(128,16,64)
self.side1 = nn.Conv2d(64,out_ch,3,padding=1)
self.side2 = nn.Conv2d(64,out_ch,3,padding=1)
self.side3 = nn.Conv2d(128,out_ch,3,padding=1)
self.side4 = nn.Conv2d(256,out_ch,3,padding=1)
self.side5 = nn.Conv2d(512,out_ch,3,padding=1)
self.side6 = nn.Conv2d(512,out_ch,3,padding=1)
self.outconv = nn.Conv2d(6,out_ch,1)
def forward(self,x):
hx = x
#stage 1
hx1 = self.stage1(hx)
hx = self.pool12(hx1)
#stage 2
hx2 = self.stage2(hx)
hx = self.pool23(hx2)
#stage 3
hx3 = self.stage3(hx)
hx = self.pool34(hx3)
#stage 4
hx4 = self.stage4(hx)
hx = self.pool45(hx4)
#stage 5
hx5 = self.stage5(hx)
hx = self.pool56(hx5)
#stage 6
hx6 = self.stage6(hx)
hx6up = _upsample_like(hx6,hx5)
#-------------------- decoder --------------------
hx5d = self.stage5d(torch.cat((hx6up,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.stage4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.stage3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.stage2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.stage1d(torch.cat((hx2dup,hx1),1))
#side output
d1 = self.side1(hx1d)
d2 = self.side2(hx2d)
d2 = _upsample_like(d2,d1)
d3 = self.side3(hx3d)
d3 = _upsample_like(d3,d1)
d4 = self.side4(hx4d)
d4 = _upsample_like(d4,d1)
d5 = self.side5(hx5d)
d5 = _upsample_like(d5,d1)
d6 = self.side6(hx6)
d6 = _upsample_like(d6,d1)
d0 = self.outconv(torch.cat((d1,d2,d3,d4,d5,d6),1))
return F.sigmoid(d0), F.sigmoid(d1), F.sigmoid(d2), F.sigmoid(d3), F.sigmoid(d4), F.sigmoid(d5), F.sigmoid(d6)
### U^2-Net small ###
class U2NETP(nn.Module):
def __init__(self,in_ch=3,out_ch=1):
super(U2NETP,self).__init__()
self.stage1 = RSU7(in_ch,16,64)
self.pool12 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage2 = RSU6(64,16,64)
self.pool23 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage3 = RSU5(64,16,64)
self.pool34 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage4 = RSU4(64,16,64)
self.pool45 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage5 = RSU4F(64,16,64)
self.pool56 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage6 = RSU4F(64,16,64)
# decoder
self.stage5d = RSU4F(128,16,64)
self.stage4d = RSU4(128,16,64)
self.stage3d = RSU5(128,16,64)
self.stage2d = RSU6(128,16,64)
self.stage1d = RSU7(128,16,64)
self.side1 = nn.Conv2d(64,out_ch,3,padding=1)
self.side2 = nn.Conv2d(64,out_ch,3,padding=1)
self.side3 = nn.Conv2d(64,out_ch,3,padding=1)
self.side4 = nn.Conv2d(64,out_ch,3,padding=1)
self.side5 = nn.Conv2d(64,out_ch,3,padding=1)
self.side6 = nn.Conv2d(64,out_ch,3,padding=1)
self.outconv = nn.Conv2d(6,out_ch,1)
def forward(self,x):
hx = x
#stage 1
hx1 = self.stage1(hx)
hx = self.pool12(hx1)
#stage 2
hx2 = self.stage2(hx)
hx = self.pool23(hx2)
#stage 3
hx3 = self.stage3(hx)
hx = self.pool34(hx3)
#stage 4
hx4 = self.stage4(hx)
hx = self.pool45(hx4)
#stage 5
hx5 = self.stage5(hx)
hx = self.pool56(hx5)
#stage 6
hx6 = self.stage6(hx)
hx6up = _upsample_like(hx6,hx5)
#decoder
hx5d = self.stage5d(torch.cat((hx6up,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.stage4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.stage3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.stage2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.stage1d(torch.cat((hx2dup,hx1),1))
#side output
d1 = self.side1(hx1d)
d2 = self.side2(hx2d)
d2 = _upsample_like(d2,d1)
d3 = self.side3(hx3d)
d3 = _upsample_like(d3,d1)
d4 = self.side4(hx4d)
d4 = _upsample_like(d4,d1)
d5 = self.side5(hx5d)
d5 = _upsample_like(d5,d1)
d6 = self.side6(hx6)
d6 = _upsample_like(d6,d1)
d0 = self.outconv(torch.cat((d1,d2,d3,d4,d5,d6),1))
return F.sigmoid(d0), F.sigmoid(d1), F.sigmoid(d2), F.sigmoid(d3), F.sigmoid(d4), F.sigmoid(d5), F.sigmoid(d6)3.2. DataLoader
data_loader.py:
# data loader
from __future__ import print_function, division
import glob
import torch
from skimage import io, transform, color
import numpy as np
import random
import math
import matplotlib.pyplot as plt
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms, utils
from PIL import Image
#==== dataset load====
class RescaleT(object):
def __init__(self,output_size):
assert isinstance(output_size,(int,tuple))
self.output_size = output_size
def __call__(self,sample):
imidx, image, label = sample['imidx'], sample['image'],sample['label']
h, w = image.shape[:2]
if isinstance(self.output_size,int):
if h > w:
new_h, new_w = self.output_size*h/w,self.output_size
else:
new_h, new_w = self.output_size,self.output_size*w/h
else:
new_h, new_w = self.output_size
new_h, new_w = int(new_h), int(new_w)
# #resize the image to new_h x new_w and convert image from range [0,255] to [0,1]
# img = transform.resize(image,(new_h,new_w),mode='constant')
# lbl = transform.resize(label,(new_h,new_w),mode='constant', order=0, preserve_range=True)
img = transform.resize(image,(self.output_size,self.output_size),mode='constant')
lbl = transform.resize(label,(self.output_size,self.output_size),mode='constant', order=0, preserve_range=True)
return {'imidx':imidx, 'image':img,'label':lbl}
class Rescale(object):
def __init__(self,output_size):
assert isinstance(output_size,(int,tuple))
self.output_size = output_size
def __call__(self,sample):
imidx, image, label = sample['imidx'], sample['image'],sample['label']
if random.random() >= 0.5:
image = image[::-1]
label = label[::-1]
h, w = image.shape[:2]
if isinstance(self.output_size,int):
if h > w:
new_h, new_w = self.output_size*h/w,self.output_size
else:
new_h, new_w = self.output_size,self.output_size*w/h
else:
new_h, new_w = self.output_size
new_h, new_w = int(new_h), int(new_w)
# #resize the image to new_h x new_w and convert image from range [0,255] to [0,1]
img = transform.resize(image,(new_h,new_w),mode='constant')
lbl = transform.resize(label,(new_h,new_w),mode='constant', order=0, preserve_range=True)
return {'imidx':imidx, 'image':img,'label':lbl}
class RandomCrop(object):
def __init__(self,output_size):
assert isinstance(output_size, (int, tuple))
if isinstance(output_size, int):
self.output_size = (output_size, output_size)
else:
assert len(output_size) == 2
self.output_size = output_size
def __call__(self,sample):
imidx, image, label = sample['imidx'], sample['image'], sample['label']
if random.random() >= 0.5:
image = image[::-1]
label = label[::-1]
h, w = image.shape[:2]
new_h, new_w = self.output_size
top = np.random.randint(0, h - new_h)
left = np.random.randint(0, w - new_w)
image = image[top: top + new_h, left: left + new_w]
label = label[top: top + new_h, left: left + new_w]
return {'imidx':imidx,'image':image, 'label':label}
class ToTensor(object):
"""Convert ndarrays in sample to Tensors."""
def __call__(self, sample):
imidx, image, label = sample['imidx'], sample['image'], sample['label']
tmpImg = np.zeros((image.shape[0],image.shape[1],3))
tmpLbl = np.zeros(label.shape)
image = image/np.max(image)
if(np.max(label)<1e-6):
label = label
else:
label = label/np.max(label)
if image.shape[2]==1:
tmpImg[:,:,0] = (image[:,:,0]-0.485)/0.229
tmpImg[:,:,1] = (image[:,:,0]-0.485)/0.229
tmpImg[:,:,2] = (image[:,:,0]-0.485)/0.229
else:
tmpImg[:,:,0] = (image[:,:,0]-0.485)/0.229
tmpImg[:,:,1] = (image[:,:,1]-0.456)/0.224
tmpImg[:,:,2] = (image[:,:,2]-0.406)/0.225
tmpLbl[:,:,0] = label[:,:,0]
# change the r,g,b to b,r,g from [0,255] to [0,1]
#transforms.Normalize(mean = (0.485, 0.456, 0.406), std = (0.229, 0.224, 0.225))
tmpImg = tmpImg.transpose((2, 0, 1))
tmpLbl = label.transpose((2, 0, 1))
return {'imidx':torch.from_numpy(imidx),
'image': torch.from_numpy(tmpImg),
'label': torch.from_numpy(tmpLbl)}
class ToTensorLab(object):
"""Convert ndarrays in sample to Tensors."""
def __init__(self,flag=0):
self.flag = flag
def __call__(self, sample):
imidx, image, label =sample['imidx'], sample['image'], sample['label']
tmpLbl = np.zeros(label.shape)
if(np.max(label)<1e-6):
label = label
else:
label = label/np.max(label)
# change the color space
if self.flag == 2: # with rgb and Lab colors
tmpImg = np.zeros((image.shape[0],image.shape[1],6))
tmpImgt = np.zeros((image.shape[0],image.shape[1],3))
if image.shape[2]==1:
tmpImgt[:,:,0] = image[:,:,0]
tmpImgt[:,:,1] = image[:,:,0]
tmpImgt[:,:,2] = image[:,:,0]
else:
tmpImgt = image
tmpImgtl = color.rgb2lab(tmpImgt)
# nomalize image to range [0,1]
tmpImg[:,:,0] = (tmpImgt[:,:,0]-np.min(tmpImgt[:,:,0]))/(np.max(tmpImgt[:,:,0])-np.min(tmpImgt[:,:,0]))
tmpImg[:,:,1] = (tmpImgt[:,:,1]-np.min(tmpImgt[:,:,1]))/(np.max(tmpImgt[:,:,1])-np.min(tmpImgt[:,:,1]))
tmpImg[:,:,2] = (tmpImgt[:,:,2]-np.min(tmpImgt[:,:,2]))/(np.max(tmpImgt[:,:,2])-np.min(tmpImgt[:,:,2]))
tmpImg[:,:,3] = (tmpImgtl[:,:,0]-np.min(tmpImgtl[:,:,0]))/(np.max(tmpImgtl[:,:,0])-np.min(tmpImgtl[:,:,0]))
tmpImg[:,:,4] = (tmpImgtl[:,:,1]-np.min(tmpImgtl[:,:,1]))/(np.max(tmpImgtl[:,:,1])-np.min(tmpImgtl[:,:,1]))
tmpImg[:,:,5] = (tmpImgtl[:,:,2]-np.min(tmpImgtl[:,:,2]))/(np.max(tmpImgtl[:,:,2])-np.min(tmpImgtl[:,:,2]))
# tmpImg = tmpImg/(np.max(tmpImg)-np.min(tmpImg))
tmpImg[:,:,0] = (tmpImg[:,:,0]-np.mean(tmpImg[:,:,0]))/np.std(tmpImg[:,:,0])
tmpImg[:,:,1] = (tmpImg[:,:,1]-np.mean(tmpImg[:,:,1]))/np.std(tmpImg[:,:,1])
tmpImg[:,:,2] = (tmpImg[:,:,2]-np.mean(tmpImg[:,:,2]))/np.std(tmpImg[:,:,2])
tmpImg[:,:,3] = (tmpImg[:,:,3]-np.mean(tmpImg[:,:,3]))/np.std(tmpImg[:,:,3])
tmpImg[:,:,4] = (tmpImg[:,:,4]-np.mean(tmpImg[:,:,4]))/np.std(tmpImg[:,:,4])
tmpImg[:,:,5] = (tmpImg[:,:,5]-np.mean(tmpImg[:,:,5]))/np.std(tmpImg[:,:,5])
elif self.flag == 1: #with Lab color
tmpImg = np.zeros((image.shape[0],image.shape[1],3))
if image.shape[2]==1:
tmpImg[:,:,0] = image[:,:,0]
tmpImg[:,:,1] = image[:,:,0]
tmpImg[:,:,2] = image[:,:,0]
else:
tmpImg = image
tmpImg = color.rgb2lab(tmpImg)
# tmpImg = tmpImg/(np.max(tmpImg)-np.min(tmpImg))
tmpImg[:,:,0] = (tmpImg[:,:,0]-np.min(tmpImg[:,:,0]))/(np.max(tmpImg[:,:,0])-np.min(tmpImg[:,:,0]))
tmpImg[:,:,1] = (tmpImg[:,:,1]-np.min(tmpImg[:,:,1]))/(np.max(tmpImg[:,:,1])-np.min(tmpImg[:,:,1]))
tmpImg[:,:,2] = (tmpImg[:,:,2]-np.min(tmpImg[:,:,2]))/(np.max(tmpImg[:,:,2])-np.min(tmpImg[:,:,2]))
tmpImg[:,:,0] = (tmpImg[:,:,0]-np.mean(tmpImg[:,:,0]))/np.std(tmpImg[:,:,0])
tmpImg[:,:,1] = (tmpImg[:,:,1]-np.mean(tmpImg[:,:,1]))/np.std(tmpImg[:,:,1])
tmpImg[:,:,2] = (tmpImg[:,:,2]-np.mean(tmpImg[:,:,2]))/np.std(tmpImg[:,:,2])
else: # with rgb color
tmpImg = np.zeros((image.shape[0],image.shape[1],3))
image = image/np.max(image)
if image.shape[2]==1:
tmpImg[:,:,0] = (image[:,:,0]-0.485)/0.229
tmpImg[:,:,1] = (image[:,:,0]-0.485)/0.229
tmpImg[:,:,2] = (image[:,:,0]-0.485)/0.229
else:
tmpImg[:,:,0] = (image[:,:,0]-0.485)/0.229
tmpImg[:,:,1] = (image[:,:,1]-0.456)/0.224
tmpImg[:,:,2] = (image[:,:,2]-0.406)/0.225
tmpLbl[:,:,0] = label[:,:,0]
# change the r,g,b to b,r,g from [0,255] to [0,1]
#transforms.Normalize(mean = (0.485, 0.456, 0.406), std = (0.229, 0.224, 0.225))
tmpImg = tmpImg.transpose((2, 0, 1))
tmpLbl = label.transpose((2, 0, 1))
return {'imidx':torch.from_numpy(imidx),
'image': torch.from_numpy(tmpImg),
'label': torch.from_numpy(tmpLbl)}
class SalObjDataset(Dataset):
def __init__(self,img_name_list,lbl_name_list,transform=None):
# self.root_dir = root_dir
# self.image_name_list = glob.glob(image_dir+'*.png')
# self.label_name_list = glob.glob(label_dir+'*.png')
self.image_name_list = img_name_list
self.label_name_list = lbl_name_list
self.transform = transform
def __len__(self):
return len(self.image_name_list)
def __getitem__(self,idx):
# image = Image.open(self.image_name_list[idx])#io.imread(self.image_name_list[idx])
# label = Image.open(self.label_name_list[idx])#io.imread(self.label_name_list[idx])
image = io.imread(self.image_name_list[idx])
imname = self.image_name_list[idx]
imidx = np.array([idx])
if(0==len(self.label_name_list)):
label_3 = np.zeros(image.shape)
else:
label_3 = io.imread(self.label_name_list[idx])
label = np.zeros(label_3.shape[0:2])
if(3==len(label_3.shape)):
label = label_3[:,:,0]
elif(2==len(label_3.shape)):
label = label_3
if(3==len(image.shape) and 2==len(label.shape)):
label = label[:,:,np.newaxis]
elif(2==len(image.shape) and 2==len(label.shape)):
image = image[:,:,np.newaxis]
label = label[:,:,np.newaxis]
sample = {'imidx':imidx, 'image':image, 'label':label}
if self.transform:
sample = self.transform(sample)
return sample3.3. Train
u2net_train.py:
import torch
import torchvision
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms, utils
import torch.optim as optim
import torchvision.transforms as standard_transforms
import numpy as np
import glob
from data_loader import Rescale
from data_loader import RescaleT
from data_loader import RandomCrop
from data_loader import ToTensor
from data_loader import ToTensorLab
from data_loader import SalObjDataset
from model import U2NET
from model import U2NETP
# ------- 1. define loss function --------
bce_loss = nn.BCELoss(size_average=True)
def muti_bce_loss_fusion(d0, d1, d2, d3, d4, d5, d6, labels_v):
loss0 = bce_loss(d0,labels_v)
loss1 = bce_loss(d1,labels_v)
loss2 = bce_loss(d2,labels_v)
loss3 = bce_loss(d3,labels_v)
loss4 = bce_loss(d4,labels_v)
loss5 = bce_loss(d5,labels_v)
loss6 = bce_loss(d6,labels_v)
loss = loss0 + loss1 + loss2 + loss3 + loss4 + loss5 + loss6
print("l0: %3f, l1: %3f, l2: %3f, l3: %3f, l4: %3f, l5: %3f, l6: %3f\n"%(loss0.data[0],loss1.data[0],loss2.data[0],loss3.data[0],loss4.data[0],loss5.data[0],loss6.data[0]))
return loss0, loss
# ------- 2. set the directory of training dataset --------
model_name = 'u2net' #'u2netp'
data_dir = os.path.join(os.getcwd(), 'train_data' + os.sep)
tra_image_dir = os.path.join('DUTS', 'DUTS-TR', 'DUTS-TR', 'im_aug' + os.sep)
tra_label_dir = os.path.join('DUTS', 'DUTS-TR', 'DUTS-TR', 'gt_aug' + os.sep)
image_ext = '.jpg'
label_ext = '.png'
model_dir = os.path.join(os.getcwd(), 'saved_models', model_name + os.sep)
epoch_num = 100000
batch_size_train = 12
batch_size_val = 1
train_num = 0
val_num = 0
tra_img_name_list = glob.glob(data_dir + tra_image_dir + '*' + image_ext)
tra_lbl_name_list = []
for img_path in tra_img_name_list:
img_name = img_path.split(os.sep)[-1]
aaa = img_name.split(".")
bbb = aaa[0:-1]
imidx = bbb[0]
for i in range(1,len(bbb)):
imidx = imidx + "." + bbb[i]
#
tra_lbl_name_list.append(data_dir + tra_label_dir + imidx + label_ext)
print("---")
print("train images: ", len(tra_img_name_list))
print("train labels: ", len(tra_lbl_name_list))
print("---")
train_num = len(tra_img_name_list)
salobj_dataset = SalObjDataset(
img_name_list=tra_img_name_list,
lbl_name_list=tra_lbl_name_list,
transform=transforms.Compose([
RescaleT(320),
RandomCrop(288),
ToTensorLab(flag=0)]))
salobj_dataloader = DataLoader(salobj_dataset, batch_size=batch_size_train, shuffle=True, num_workers=1)
# ------- 3. define model --------
# define the net
if(model_name=='u2net'):
net = U2NET(3, 1)
elif(model_name=='u2netp'):
net = U2NETP(3,1)
if torch.cuda.is_available():
net.cuda()
# ------- 4. define optimizer --------
print("---define optimizer...")
optimizer = optim.Adam(net.parameters(), lr=0.001, betas=(0.9, 0.999), eps=1e-08, weight_decay=0)
# ------- 5. training process --------
print("---start training...")
ite_num = 0
running_loss = 0.0
running_tar_loss = 0.0
ite_num4val = 0
save_frq = 2000 # save the model every 2000 iterations
for epoch in range(0, epoch_num):
net.train()
for i, data in enumerate(salobj_dataloader):
ite_num = ite_num + 1
ite_num4val = ite_num4val + 1
inputs, labels = data['image'], data['label']
inputs = inputs.type(torch.FloatTensor)
labels = labels.type(torch.FloatTensor)
# wrap them in Variable
if torch.cuda.is_available():
inputs_v, labels_v = Variable(inputs.cuda(), requires_grad=False),
Variable(labels.cuda(), requires_grad=False)
else:
inputs_v, labels_v = Variable(inputs, requires_grad=False),
Variable(labels, requires_grad=False)
# y zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
d0, d1, d2, d3, d4, d5, d6 = net(inputs_v)
loss2, loss = muti_bce_loss_fusion(d0, d1, d2, d3, d4, d5, d6, labels_v)
loss.backward()
optimizer.step()
# # print statistics
running_loss += loss.data[0]
running_tar_loss += loss2.data[0]
# del temporary outputs and loss
del d0, d1, d2, d3, d4, d5, d6, loss2, loss
print("[epoch: %3d/%3d, batch: %5d/%5d, ite: %d] train loss: %3f, tar: %3f " % (
epoch + 1, epoch_num, (i + 1) * batch_size_train, train_num, ite_num, running_loss / ite_num4val, running_tar_loss / ite_num4val))
if ite_num % save_frq == 0:
torch.save(net.state_dict(),
model_dir + model_name+"_bce_itr_%d_train_%3f_tar_%3f.pth" % (ite_num, running_loss / ite_num4val, running_tar_loss / ite_num4val))
running_loss = 0.0
running_tar_loss = 0.0
net.train() # resume train
ite_num4val = 0
if __name__ == "__main__":
main()3.4. Test
u2net_test.py:
import os
from skimage import io, transform
import torch
import torchvision
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms#, utils
# import torch.optim as optim
import numpy as np
from PIL import Image
import glob
from data_loader import RescaleT
from data_loader import ToTensor
from data_loader import ToTensorLab
from data_loader import SalObjDataset
from model import U2NET # full size version 173.6 MB
from model import U2NETP # small version u2net 4.7 MB
# normalize the predicted SOD probability map
def normPRED(d): # QA.
ma = torch.max(d)
mi = torch.min(d)
dn = (d-mi)/(ma-mi)
return dn
def save_output(image_name,pred,d_dir):
predict = pred
predict = predict.squeeze()
predict_np = predict.cpu().data.numpy()
im = Image.fromarray(predict_np*255).convert('RGB')
img_name = image_name.split(os.sep)[-1]
image = io.imread(image_name)
imo = im.resize((image.shape[1],image.shape[0]),resample=Image.BILINEAR)
pb_np = np.array(imo)
aaa = img_name.split(".")
bbb = aaa[0:-1]
imidx = bbb[0]
for i in range(1,len(bbb)):
imidx = imidx + "." + bbb[i]
imo.save(d_dir+imidx+'.png')
def main():
# --------- 1. get image path and name ---------
model_name='u2net' #u2netp
image_dir = os.path.join(os.getcwd(), 'test_data', 'test_images')
prediction_dir = os.path.join(os.getcwd(), 'test_data', model_name + '_results' + os.sep)
model_dir = os.path.join(os.getcwd(), 'saved_models', model_name, model_name + '.pth')
img_name_list = glob.glob(image_dir + os.sep + '*')
print(img_name_list)
# --------- 2. dataloader ---------
#1. dataloader
test_salobj_dataset = SalObjDataset(img_name_list = img_name_list,
lbl_name_list = [],
transform=transforms.Compose([RescaleT(320),
ToTensorLab(flag=0)]) )
test_salobj_dataloader = DataLoader(test_salobj_dataset,
batch_size=1,
shuffle=False,
num_workers=1)
# --------- 3. model define ---------
if(model_name=='u2net'):
print("...load U2NET---173.6 MB")
net = U2NET(3,1)
elif(model_name=='u2netp'):
print("...load U2NEP---4.7 MB")
net = U2NETP(3,1)
net.load_state_dict(torch.load(model_dir))
if torch.cuda.is_available():
net.cuda()
net.eval()
# --------- 4. inference for each image ---------
for i_test, data_test in enumerate(test_salobj_dataloader):
print("inferencing:",img_name_list[i_test].split(os.sep)[-1])
inputs_test = data_test['image']
inputs_test = inputs_test.type(torch.FloatTensor)
if torch.cuda.is_available():
inputs_test = Variable(inputs_test.cuda())
else:
inputs_test = Variable(inputs_test)
d1,d2,d3,d4,d5,d6,d7= net(inputs_test)
# normalization
pred = d1[:,0,:,:]
pred = normPRED(pred)
# save results to test_results folder
if not os.path.exists(prediction_dir):
os.makedirs(prediction_dir, exist_ok=True)
save_output(img_name_list[i_test],pred,prediction_dir)
del d1,d2,d3,d4,d5,d6,d7
if __name__ == "__main__":
main()4. 相关
[1] - 使用u^2net打造属于自己的remove-the-background - 2020.05.15 - 知乎
[2] - 发现一个好用的显著性检测算法u^2 Net 2020 - 2020.06.23 - 知乎
[3] - DeepLearing—CV系列(十九)——图像分割之U^2-Net(效果极好)的Pytorch实现 - 2020.06.29 - CSDN