论文: Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks - ICCV2015
作者: Shaoqing Ren, Kaiming He, Ross Girshick, Jian Sun
团队: Microsoft Research
Code-Caffe-Python
Code-Caffe-Matlab
ICCV2015 - Slides
目标检测依赖于 region proposal 算法.
Faster R-CNN 提出 Region Proposal Network(RPN),与检测网络共享整张图片的卷积特征,region proposal 计算量几乎很少.
RPN 是全卷积网络,能够同时预测 object 边界和每个位置 object 的 score.
RPNs 是 end-to-end 训练的,以生成高质量的 region proposals.
Fast R-CNN 利用 region proposals 来进行目标检测.
基于 VGG-16,检测速率在 GPU 上是 5帧/秒.
1. 回顾
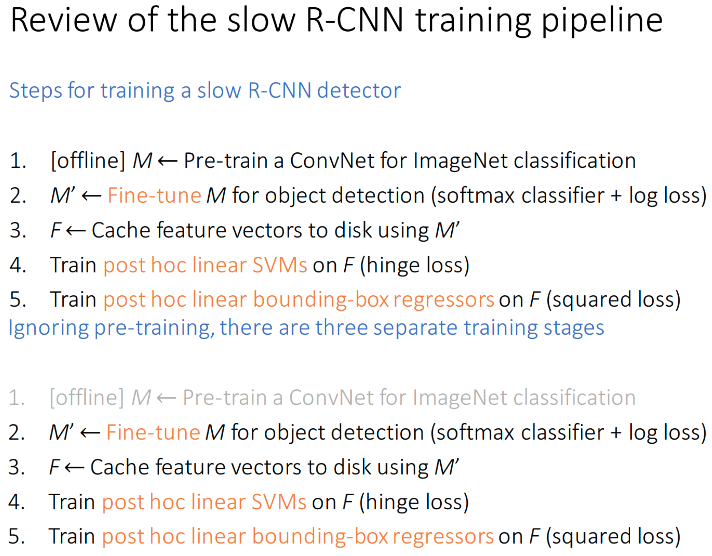
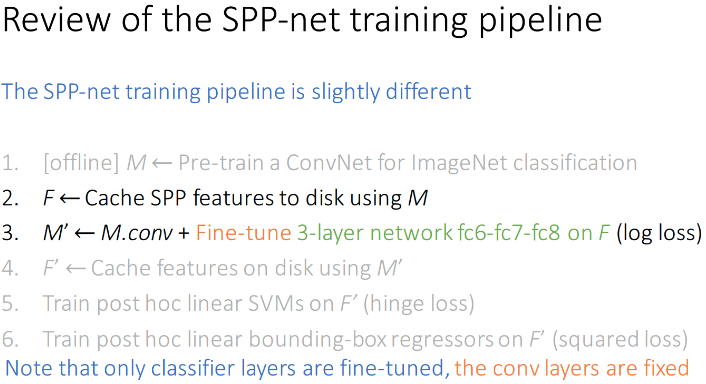
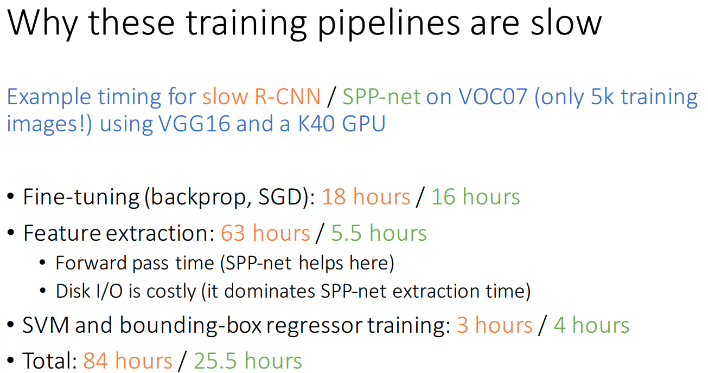
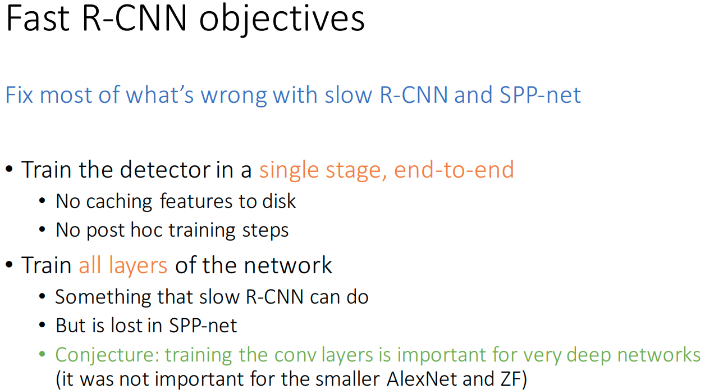
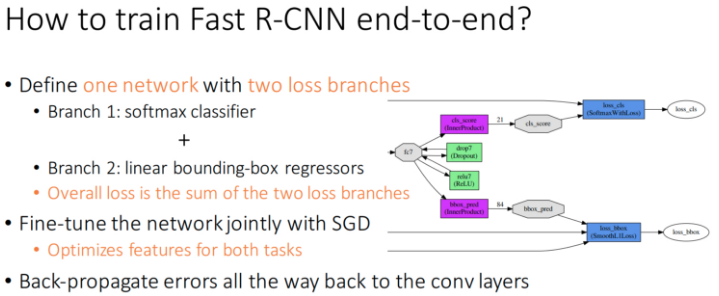
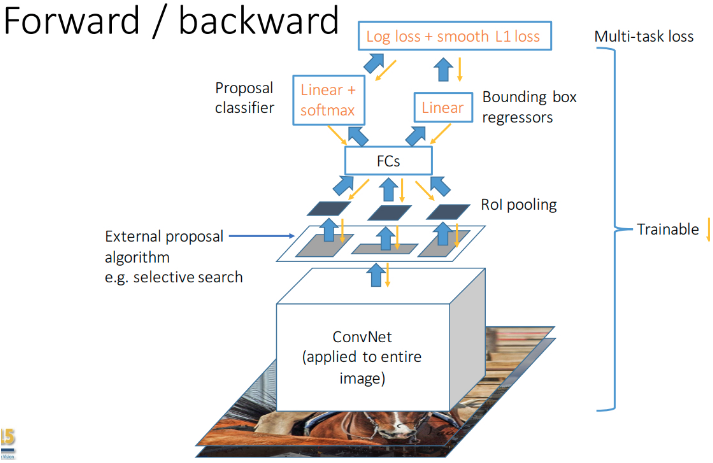
End-to-end 训练的好处:
- 实现简单;
训练速度更快
- 不需要再将特征写入磁盘, 并再从磁盘读取; 减少 IO .
- 不需要 SVMs 和 bounding-box 回归器单独训练.
- 优化单个 multi-task 目标的方式, 比独立优化每个 task 更优(经验上验证了).
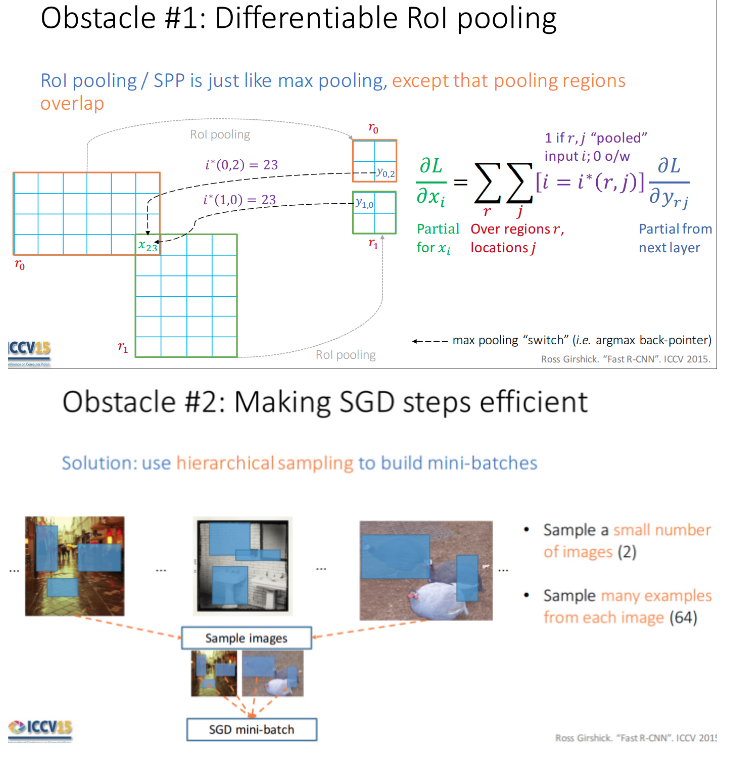
但是, End-to-end 训练需要解决两个技术问题:
2. Faster R-CNN
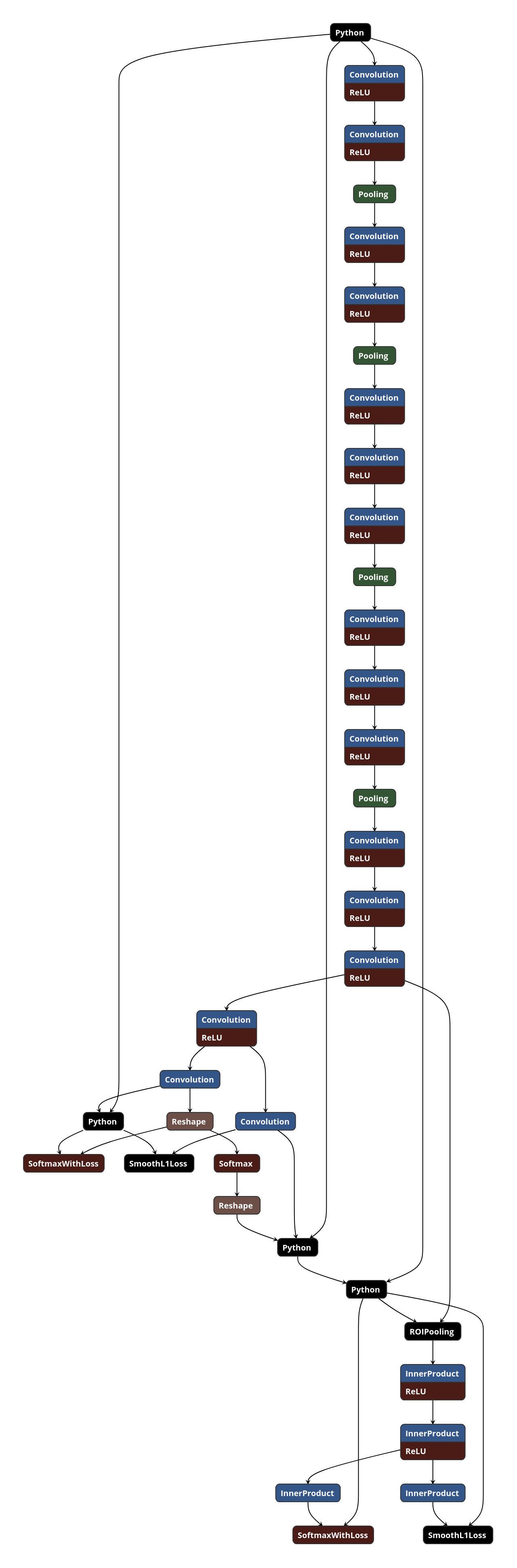
Faster R-CNN 的基本结构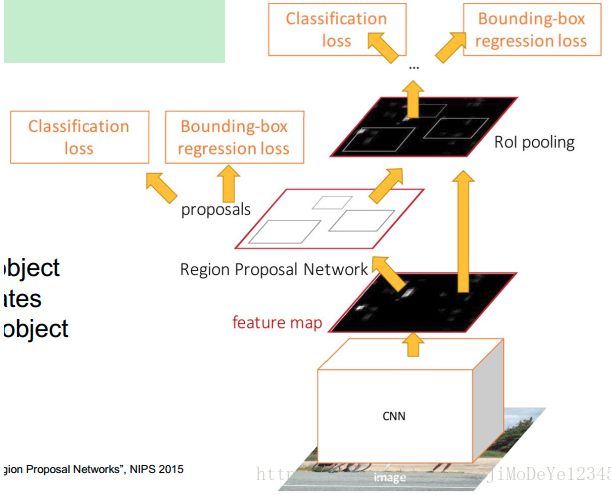
其大致可以包括四部分:
- Conv Layers - 输入是 image,输出是提取的图片的 feature maps,被用作 RPN 和全连接层的共享特征;
- RPN - 基于 feature maps 来生成 region proposals. 主要是对 anchors 采用 softmax 来确定其是 foreground 或 background,并对 anchors 进行 bounding box 回归,进而获得理想的 proposals;
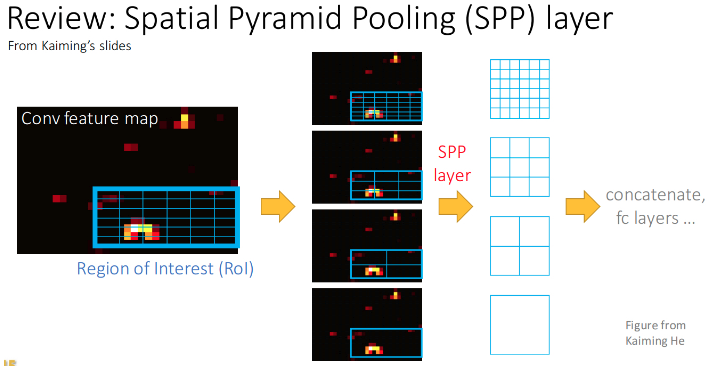
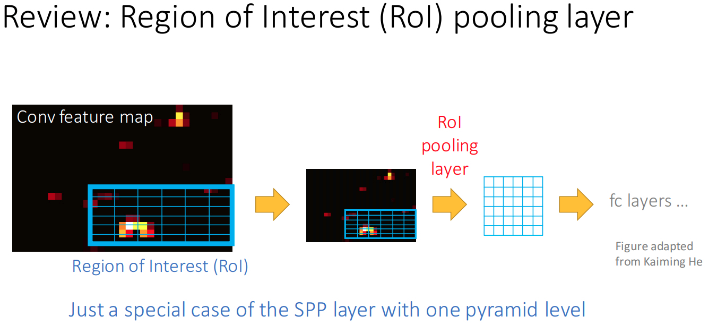
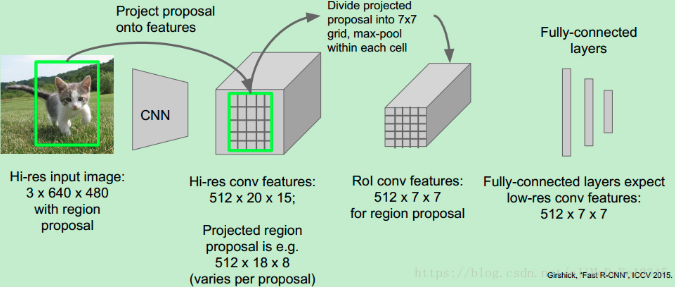
- RoI Pooling - 输入是 feature map 和 proposals,输出是提取的 proposal feature maps,被用于全连接层对类别判定;
- Classifier - 基于 proposal feature maps 来对 proposal 的类别进行计算,并再次进行 bounding box 回归,以得到准确的 object 检测框位置.
3. Region Proposal Networks(RPN)
region-based 检测器(如 Fast R-CNN)用到的卷积特征图(feature maps),也可以用来生成 region proposals.
RPN 采用任意尺寸的图片作为输入,并输出 object proposals 的矩形框集合,每个矩形框都有一个 object score.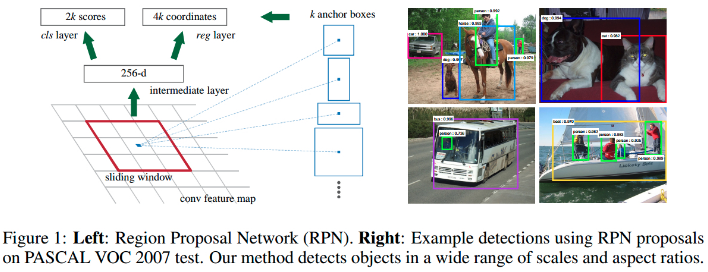
生成 region proposals 的过程:
- 针对最后一个共享卷积层输出的 conv feature map,采用一个小网络对其平滑.该小网络全连接到输入 conv feature map 的一个 n×n 的空间窗口(spatial window). 这里 n=3.n×n 的卷积层后接 ReLUs 层.
- 每个滑窗被映射为一个低维向量(256-d/ZF,512-d/VGG).
- 低维向量被输入到两个并列 1×1 的卷积层 --边界框回归层(_reg_) 和边界框分类层(_cls_).
在实际网络中的 RPN 结构(VGG16-test.prototxt):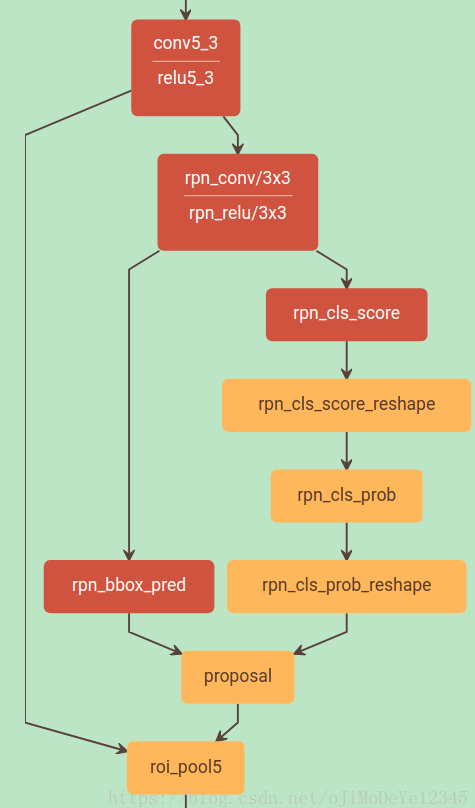
3.1. 平移不变 Anchors
在每个滑窗位置,同时预测 k 个 region proposals,因此,reg 层有 4k 个输出,以编码 k 个边界框坐标;cls 层输出 2k 个 scores,以估计每个 proposal 的 object/non-object 的概率.
k 个 proposals 相对于 k 个参考 boxes 进行参数化,记为 anchors,其是一组矩形框. 每个 anchor 在滑窗的中心,并与一个 scale 和 aspect ratio 相关. 这里采用 3 个 scales 和 3 个 aspect ratios,在每个滑窗位置得到 k=9 个anchors.
对于一个 W×H (典型值约为2400) 的 conv feature map,会得到 WHk 个 anchors.
Faster R-CNN 的一个重要属性是,对于 anchors 和计算相对于 anchors 的 proposals 的函数,都具有平移不变性.
对比而言,MultiBox 方法采用 k-means 生成 800 个 anchors,但不具有平移不变性. 如果,平移图片中的一个 object,对应的 proposal 也应该进行平移;相同的函数应该能预测该 proposal. 由于 MultiBox anchors 不具有平移不变性,其需要 (4+1)×800 维的输出层,而 Faster R-CNN 需要 (4+2)×9 维输出层.
Faster R-CNN 参数更少,在小数据集上过拟合的风险更低.
3.2. Region Proposals 学习的 Loss 函数
训练 RPNs,对每个 anchor 设定一个二值类别标签(0或1,是 object 或不是 object).
对两类 anchors 设定 positive 标签:
- 与 groundtruth box 间的 IoU 最大的 anchor(s);
- 与 groundtruth box 间的 IoU 大于 0.7 的 anchor.
单个 groundtruth box 可能对多个 anchors 设定为 positive 标签.
如果 non-positive anchor 与 groundtruth box 的IoU 小于 0.3,则设定该 anchor 为 negative 标签.
positive 和 negative 的 anchor 不影响训练目标函数.
类似于 Fast R-CNN 的 multi-task loss,Faster R-CNN 的目标函数为:

- i - mini-batch 内 anchor 的索引;
- ${ p_i }$ - anchor i 是某个 object 的预测概率;
- ${ p_i^{\ast} }$ - 如果 anchor 是 positive,则 groundtruth label ${ p_i^{\ast} = 1 }$;如果 anchor 是 negative,则 groundtruth label ${ p_i^{\ast} = 0 }$;
- ${ t_i }$ - 表示预测边界框的 4 个参数化坐标的向量;
- ${ t_i^{\ast} }$ - 对应于 positive anchor 的 groundtruth 边界框的 4 个坐标的向量;
- ${ L_{cls}(p_i, p_i^{\ast}) }$ - 二类 softmax loss
- ${ L_{reg}(t_i, t_i^{\ast}) = R(t_i- t_i^{\ast}) }$ - ${ R }$ 是 smooth L1 loss.
- ${ p_i^{\ast}L_{reg} }$ - 表示只有 positive anchor(${ p_i^{\ast} = 1}$) 时,回归loss 才会激活;如果${ p_i^{\ast} = 0 }$,则其值为 0.
cls 层和 reg 层的输出分别包含 ${ \lbrace p_i \rbrace }$ 和 ${ \lbrace t_i \rbrace }$,这两项通过 ${ N_{cls} }$ 和 ${ N_{reg} }$ 进行归一化,并加入平衡权重 ${ \lambda }$.
对于边界框回归 loss,采用 4 个坐标进行参数化,即:

其中,
x,y,w,h 分别表示 box 中心的两个坐标,box 的 width 和 height.
${ x, x_a, x^{\ast} }$ 分别为预测 box,anchor box 和 groundtruth box.
可以看作是,从一个 anchor box 到其附近的 groundtruth box 的边界框回归.
用于回归的特征具有相同的 feature map 空间尺寸( n×n );对于不同尺寸,来学习 k 个 边界框回归器. 每个回归器学习一个 scale 和 aspect ratio,k 个回归器不共享权重. 因此,即使特征是 固定尺寸/scale 的,也可以预测不同尺寸的 boxes.
3.3. 优化
- RPN,全卷积网络,可以利用 SGD 和 BP 进行 end-to-end 的训练;
- image-centric 的采样策略;
- 每个 mini-batch 由包含许多 positive 和 negative anchors 的单张图片构成;
- 随机采样一张图片的 256 个 anchors 来计算 mini-batch 的 loss,采样的 positive anchors 和 negative anchors 的比例为 1:1;如果一张图片的 positive anchors 少于 128,则用 negative anchors 来补全 mini-batch.
- 采用均值为 0,方差为0.01 的 Gaussian 分布来初始化网络新加入的层;
- 采用 ImageNet 分类任务的预训练模型来初始化其它网络层;
- PASCAL 数据集上,前 60K 次 mini-batches,learning_rate=0.001,后 20K 次迭代,learning_rate=0.0001;
- momentum=0.9,weight_decay=0.0005.
3.4. Region Proposal 和目标检测共享卷积层特征
4-step 训练算法,以通过交替优化来学习共享特征:
[1] - 训练 RPN;采用 ImageNet 训练模型进行网络初始化,并针对 region proposal 任务进行 end-to-end 的 fine-tuned.
[2] - 基于 RPN 生成的 proposals,采用 Fast R-CNN 来训练一个单独的检测网络;检测网络也是采用 ImageNet 训练模型初始化;此时,两个网络是不共享卷积层的.
[3] - 采用检测网络来初始化 RPN 的训练,但固定共享卷积层,只 fine-tune RPN 的网络层;现在,两个网络共享卷积层.
[4] - 固定共享卷积层,fine-tune Fast R-CNN 的 FC 层.
至此,两个网络共享了相同的卷积层,形成了统一网络.
3.5. 实现细节
- 采用 single-scale 图片来训练和测试 region proposal 和 object detection 网络;
- 将图片短边 rescale 到 600 像素;
- 针对 anchors,采用 3 种 scale —— box 面积分别为 $128^2$,$256^2$,$512^2$ 像素, 3 种 aspect ratios -- 1:1,1:2,1:3.
- 跨图像边界的 anchor boxes 的处理.
训练时,忽略所有的 cross-boundary anchors,因此,其不会影响 loss.
一张 1000 × 600 的图片,总共会产生约 20k(60×40×9) 个 anchors. 忽略掉 cross-boundary anchors,大约每张图片还有 6K anchors 用于训练;如果不忽略,会导致目标函数引入较大的误差,训练不收敛.
测试时,仍采用全卷积 RPN 来处理整张图片. - 由于 RPN proposals 会高度重叠,这里采用 NMS 基于 proposal regions 的 cls scores 进行处理;
固定 NMS 的 IoU 阈值为 0.7,每张图片大约能保留 2k proposal regions. - NMS 处理后,采用 top-N proposal regions 进行目标检测.
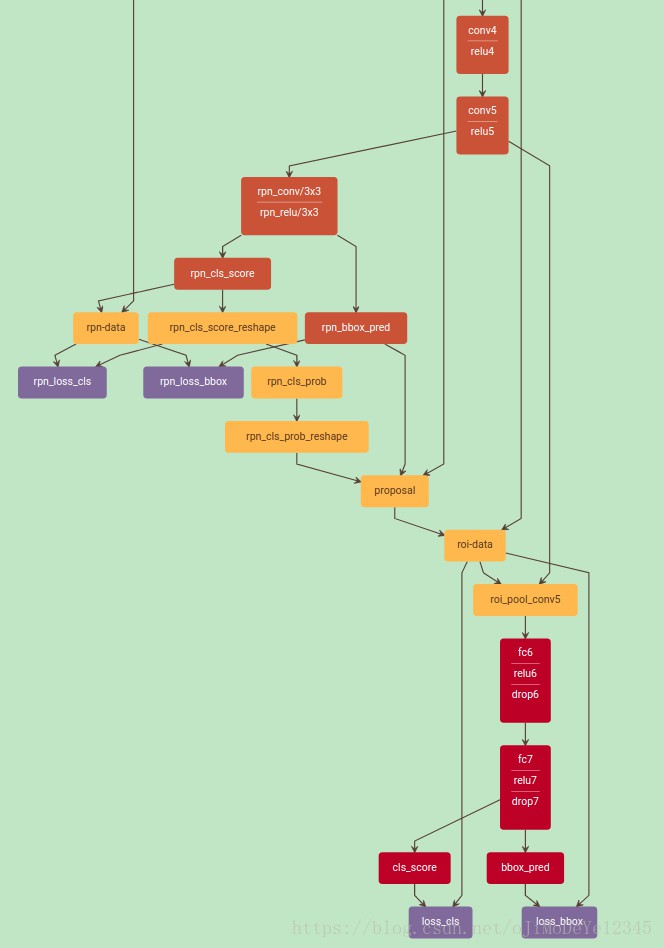
4. 训练网络
models/coco/VGG16/faster_rcnn_end2end/train.prototxt
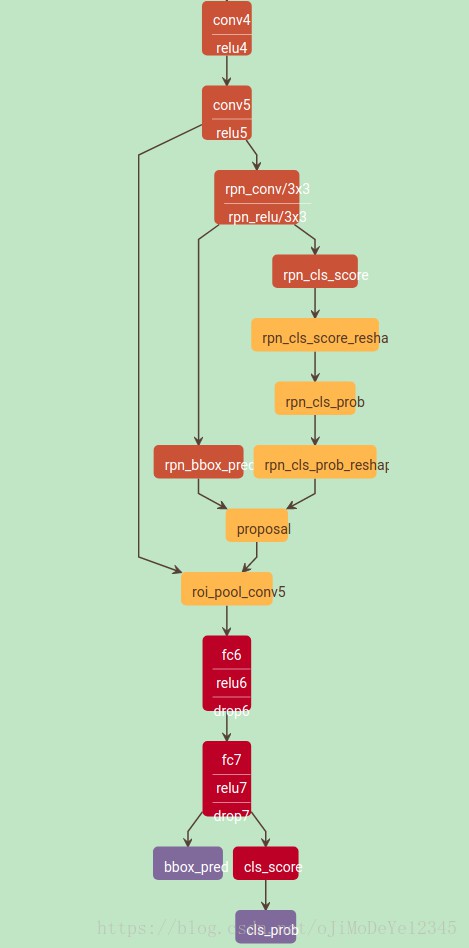
5. 测试网络
models/coco/VGG16/faster_rcnn_end2end/test.prototxt

6. Reference
[1] - 机器学习随笔 - Faster R-CNN