Project - PointRend - detectron2
Tutorial - PointRend in Detectron2
主要包括两部分:
[1] - PointRend 预训练模型的测试.
[2] - PointRend 中间特征表示(intermediate representations).
Colab 里基于 CUDA10.1 的环境配置如下:
# 1. torch, torchvision 安装
pip install -U torch==1.5 torchvision==0.6 -f https://download.pytorch.org/whl/cu101/torch_stable.html
pip install cython pyyaml==5.1
pip install -U 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
#import torch, torchvision
#torch.__version__
# 2. detectron2 安装
pip install detectron2==0.1.3 -f https://dl.fbaipublicfiles.com/detectron2/wheels/cu101/torch1.5/index.html
# clone the repo to access PointRend code. Use the same version as the installed detectron2
git clone --branch v0.1.3 https://github.com/facebookresearch/detectron2 detectron2_repo1. PointRend 预训练模型测试
#!/usr/bin/python3
#!--*-- coding: utf-8 --*--
import numpy as np
import cv2
import matplotlib.pyplot as plt
import torch
# import some common detectron2 utilities
import detectron2
from detectron2.utils.logger import setup_logger
setup_logger()
from detectron2 import model_zoo
from detectron2.engine import DefaultPredictor
from detectron2.config import get_cfg
from detectron2.utils.visualizer import Visualizer, ColorMode
from detectron2.data import MetadataCatalog
coco_metadata = MetadataCatalog.get("coco_2017_val")
# import PointRend project
import sys; sys.path.insert(1, "detectron2_repo/projects/PointRend")
import point_rend
# 测试图片
# http://images.cocodataset.org/val2017/000000005477.jpg
im = cv2.imread("/path/to/input.jpg")
cv2_imshow(im)
# 标准 Mask RCNN 模型
cfg = get_cfg()
cfg.merge_from_file(model_zoo.get_config_file("COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x.yaml"))
cfg.MODEL.ROI_HEADS.SCORE_THRESH_TEST = 0.5 # set threshold for this model
cfg.MODEL.WEIGHTS = model_zoo.get_checkpoint_url("COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x.yaml")
mask_rcnn_predictor = DefaultPredictor(cfg)
mask_rcnn_outputs = mask_rcnn_predictor(im)
# PointRend 模型
cfg = get_cfg()
# Add PointRend-specific config
point_rend.add_pointrend_config(cfg)
# Load a config from file
cfg.merge_from_file("detectron2_repo/projects/PointRend/configs/InstanceSegmentation/pointrend_rcnn_R_50_FPN_3x_coco.yaml")
cfg.MODEL.ROI_HEADS.SCORE_THRESH_TEST = 0.5 # set threshold for this model
# Use a model from PointRend model zoo: https://github.com/facebookresearch/detectron2/tree/master/projects/PointRend#pretrained-models
cfg.MODEL.WEIGHTS = "detectron2://PointRend/InstanceSegmentation/pointrend_rcnn_R_50_FPN_3x_coco/164955410/model_final_3c3198.pkl"
predictor = DefaultPredictor(cfg)
outputs = predictor(im)
# 可视化 - 对比两个输出结果.
v = Visualizer(im[:, :, ::-1], coco_metadata, scale=1.2, instance_mode=ColorMode.IMAGE_BW)
mask_rcnn_result = v.draw_instance_predictions(mask_rcnn_outputs["instances"].to("cpu")).get_image()
v = Visualizer(im[:, :, ::-1], coco_metadata, scale=1.2, instance_mode=ColorMode.IMAGE_BW)
point_rend_result = v.draw_instance_predictions(outputs["instances"].to("cpu")).get_image()
print("Mask R-CNN with PointRend (top) vs. Default Mask R-CNN (bottom)")
#
plt.figure(fig_size=(10, 8))
plt.subplot(121)
plt.imshow(point_rend_result[:, :, ::-1])
plt.axis('off')
plt.subplot(122)
plt.imshow(mask_rcnn_result[:, :, ::-1])
plt.axis('off')
plt.show()输出如:

2. PointRend 点采样过程可视化
主要是介绍 PointRend 中 point sampling 处理的工作原理. 对此,采用 model.forward()预测的中间特征表示.
首先,定义一个可视化中间特征的函数:
import matplotlib.pyplot as plt
def plot_mask(mask, title="", point_coords=None, figsize=10, point_marker_size=5):
'''
Simple plotting tool to show intermediate mask predictions and points
where PointRend is applied.
Args:
mask (Tensor): mask prediction of shape HxW
title (str): title for the plot
point_coords ((Tensor, Tensor)): x and y point coordinates
figsize (int): size of the figure to plot
point_marker_size (int): marker size for points
'''
H, W = mask.shape
plt.figure(figsize=(figsize, figsize))
if title:
title += ", "
plt.title("{}resolution {}x{}".format(title, H, W), fontsize=30)
plt.ylabel(H, fontsize=30)
plt.xlabel(W, fontsize=30)
plt.xticks([], [])
plt.yticks([], [])
plt.imshow(mask, interpolation="nearest", cmap=plt.get_cmap('gray'))
if point_coords is not None:
plt.scatter(x=point_coords[0], y=point_coords[1], color="red", s=point_marker_size, clip_on=True)
plt.xlim(-0.5, W - 0.5)
plt.ylim(H - 0.5, - 0.5)
plt.show()网络前向计算 - predictor:
#
model = predictor.model
# In this image we detect several objects but show only the first one.
instance_idx = 0
# Mask predictions are class-specific, "plane" class has id 4.
category_idx = 4
with torch.no_grad():
# Prepare input image.
height, width = im.shape[:2]
im_transformed = predictor.transform_gen.get_transform(im).apply_image(im)
batched_inputs = [{"image": torch.as_tensor(im_transformed).permute(2, 0, 1)}]
# Get bounding box predictions first to simplify the code.
detected_instances = [x["instances"] for x in model.inference(batched_inputs)]
[r.remove("pred_masks") for r in detected_instances] # remove existing mask predictions
pred_boxes = [x.pred_boxes for x in detected_instances]
# Run backbone.
images = model.preprocess_image(batched_inputs)
features = model.backbone(images.tensor)
# Given the bounding boxes, run coarse mask prediction head.
mask_coarse_logits = model.roi_heads._forward_mask_coarse(features, pred_boxes)
plot_mask(mask_coarse_logits[instance_idx, category_idx].to("cpu"),
title="Coarse prediction")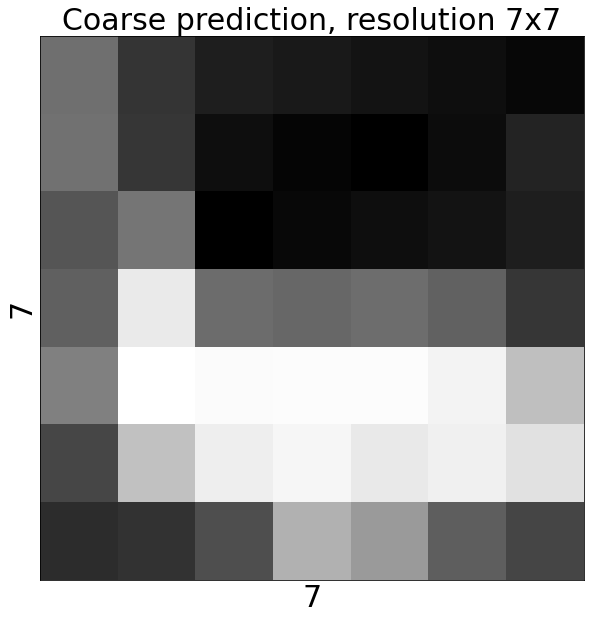
# Prepare features maps to use later
mask_features_list = [features[k] for k in model.roi_heads.mask_point_in_features]
features_scales = [model.roi_heads._feature_scales[k]
for k in model.roi_heads.mask_point_in_features]2.1. 训练阶段 - Point Sampling
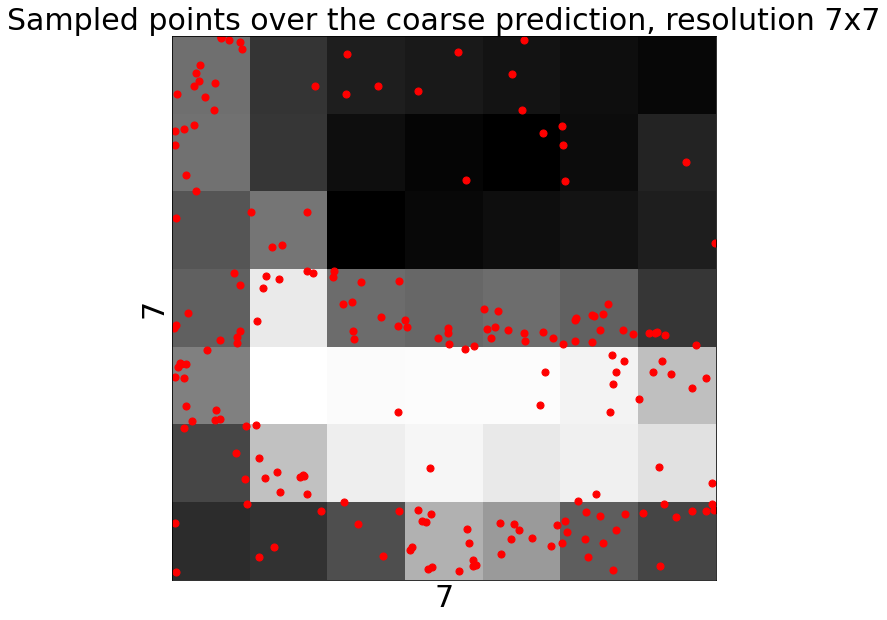
在训练阶段,选择 coarse prediction 中不确定的点,用于训练 PointRend head.
为了可视化不同采样策略的影响,改变 oversample_ratio 和 importance_sample_ratio 参数:
from point_rend.roi_heads import calculate_uncertainty
from point_rend.point_features import get_uncertain_point_coords_with_randomness
# Change number of points to select
num_points = 14 * 14
# Change randomness parameters
oversample_ratio = 3 # `k` in the paper
importance_sample_ratio = 0.75 # `\beta` in the paper
with torch.no_grad():
# We take predicted classes, whereas during real training ground truth classes are used.
pred_classes = torch.cat([x.pred_classes for x in detected_instances])
# Select points given a corse prediction mask
point_coords = get_uncertain_point_coords_with_randomness(
mask_coarse_logits,
lambda logits: calculate_uncertainty(logits, pred_classes),
num_points=num_points,
oversample_ratio=oversample_ratio,
importance_sample_ratio=importance_sample_ratio)
H, W = mask_coarse_logits.shape[-2:]
plot_mask(
mask_coarse_logits[instance_idx, category_idx].to("cpu"),
title="Sampled points over the coarse prediction",
point_coords=(
W * point_coords[instance_idx, :, 0].to("cpu") - 0.5,
H * point_coords[instance_idx, :, 1].to("cpu") - 0.5),
point_marker_size=50
)输出如:
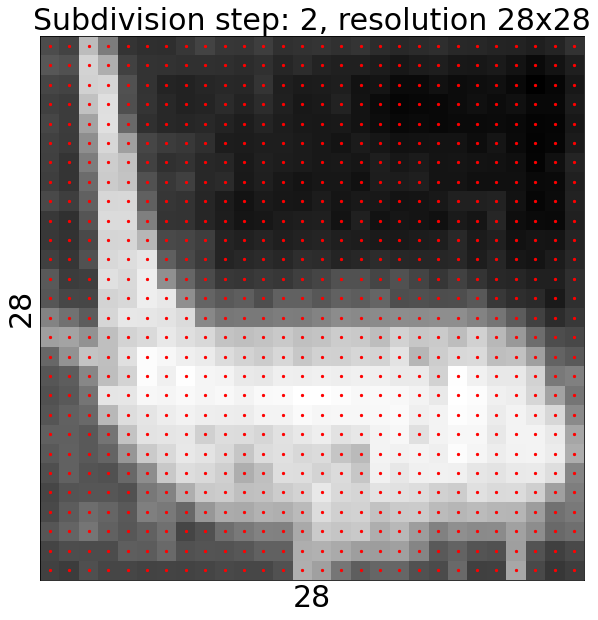
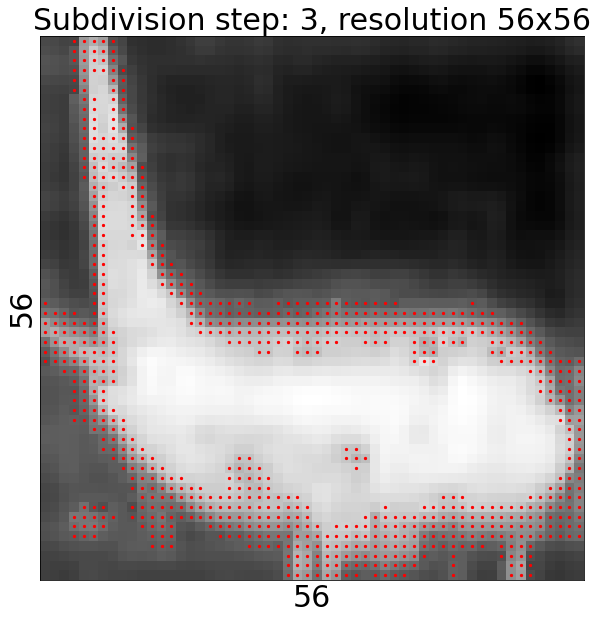
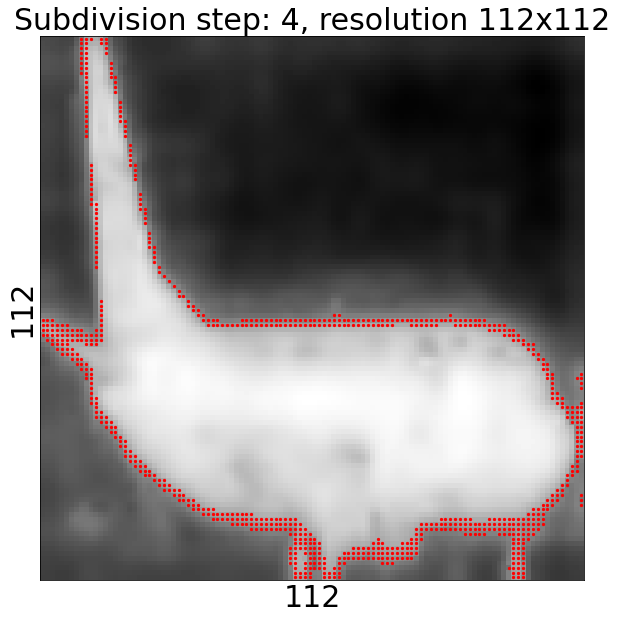
2.2. 推断阶段 - Point Sampling
对于 7x7 的 coarse prediction,采用双线性上采样(bilinearly upsample) num_subdivision_steps 步处理.
对于每一步上采样处理,寻找 num_subdivision_points 个最不确定的点(uncertain points),并采用 PointRend head 网络来对它们进行预测.
修改 num_subdivision_steps 和 num_subdivision_points 参数,改变下面的推断结果.
from detectron2.layers import interpolate
from point_rend.roi_heads import calculate_uncertainty
from point_rend.point_features import (
get_uncertain_point_coords_on_grid,
point_sample,
point_sample_fine_grained_features,
)
num_subdivision_steps = 5
num_subdivision_points = 28 * 28
with torch.no_grad():
plot_mask(
mask_coarse_logits[0, category_idx].to("cpu").numpy(),
title="Coarse prediction"
)
mask_logits = mask_coarse_logits
for subdivions_step in range(num_subdivision_steps):
# Upsample mask prediction
mask_logits = interpolate(
mask_logits, scale_factor=2, mode="bilinear", align_corners=False
)
# If `num_subdivision_points` is larger or equalt to the
# resolution of the next step, then we can skip this step
H, W = mask_logits.shape[-2:]
if (num_subdivision_points >= 4 * H * W
and subdivions_step < num_subdivision_steps - 1):
continue
# Calculate uncertainty for all points on the upsampled regular grid
uncertainty_map = calculate_uncertainty(mask_logits, pred_classes)
# Select most `num_subdivision_points` uncertain points
point_indices, point_coords = get_uncertain_point_coords_on_grid(
uncertainty_map,
num_subdivision_points)
# Extract fine-grained and coarse features for the points
fine_grained_features, _ = point_sample_fine_grained_features(
mask_features_list, features_scales, pred_boxes, point_coords
)
coarse_features = point_sample(mask_coarse_logits, point_coords, align_corners=False)
# Run PointRend head for these points
point_logits = model.roi_heads.mask_point_head(fine_grained_features, coarse_features)
# put mask point predictions to the right places on the upsampled grid.
R, C, H, W = mask_logits.shape
x = (point_indices[instance_idx] % W).to("cpu")
y = (point_indices[instance_idx] // W).to("cpu")
point_indices = point_indices.unsqueeze(1).expand(-1, C, -1)
mask_logits = (mask_logits.reshape(R, C, H * W)
.scatter_(2, point_indices, point_logits)
.view(R, C, H, W) )
#
plot_mask(
mask_logits[instance_idx, category_idx].to("cpu"),
title="Subdivision step: {}".format(subdivions_step + 1),
point_coords=(x, y)
)

可视化前面的预测mask.
from detectron2.modeling import GeneralizedRCNN
from detectron2.modeling.roi_heads.mask_head import mask_rcnn_inference
results = detected_instances
mask_rcnn_inference(mask_logits, results)
results = GeneralizedRCNN._postprocess(results, batched_inputs, images.image_sizes)[0]
# We can use `Visualizer` to draw the predictions on the image.
v = Visualizer(im_transformed[:, :, ::-1], coco_metadata)
v = v.draw_instance_predictions(results["instances"].to("cpu"))
cv2_imshow(v.get_image()[:, :, ::-1])
3. PointRend 相关代码
point_feature.py:
import torch
from torch.nn import functional as F
from detectron2.layers import cat
from detectron2.structures import Boxes
"""
Shape shorthand in this module:
N: minibatch dimension size, i.e. the number of RoIs for instance segmenation or the
number of images for semantic segmenation.
R: number of ROIs, combined over all images, in the minibatch
P: number of points
"""
def point_sample(input, point_coords, **kwargs):
"""
A wrapper around :function:`torch.nn.functional.grid_sample` to support 3D point_coords tensors.
Unlike :function:`torch.nn.functional.grid_sample` it assumes `point_coords` to lie inside
[0, 1] x [0, 1] square.
Args:
input (Tensor): A tensor of shape (N, C, H, W) that contains features map on a H x W grid.
point_coords (Tensor): A tensor of shape (N, P, 2) or (N, Hgrid, Wgrid, 2) that contains
[0, 1] x [0, 1] normalized point coordinates.
Returns:
output (Tensor): A tensor of shape (N, C, P) or (N, C, Hgrid, Wgrid) that contains
features for points in `point_coords`. The features are obtained via bilinear
interplation from `input` the same way as :function:`torch.nn.functional.grid_sample`.
"""
add_dim = False
if point_coords.dim() == 3:
add_dim = True
point_coords = point_coords.unsqueeze(2)
output = F.grid_sample(input, 2.0 * point_coords - 1.0, **kwargs)
if add_dim:
output = output.squeeze(3)
return output
def generate_regular_grid_point_coords(R, side_size, device):
"""
Generate regular square grid of points in [0, 1] x [0, 1] coordinate space.
Args:
R (int): The number of grids to sample, one for each region.
side_size (int): The side size of the regular grid.
device (torch.device): Desired device of returned tensor.
Returns:
(Tensor): A tensor of shape (R, side_size^2, 2) that contains coordinates
for the regular grids.
"""
aff = torch.tensor([[[0.5, 0, 0.5], [0, 0.5, 0.5]]], device=device)
r = F.affine_grid(aff, torch.Size((1, 1, side_size, side_size)), align_corners=False)
return r.view(1, -1, 2).expand(R, -1, -1)
def get_uncertain_point_coords_with_randomness(
coarse_logits, uncertainty_func, num_points, oversample_ratio, importance_sample_ratio
):
"""
Sample points in [0, 1] x [0, 1] coordinate space based on their uncertainty. The unceratinties
are calculated for each point using 'uncertainty_func' function that takes point's logit
prediction as input.
See PointRend paper for details.
Args:
coarse_logits (Tensor): A tensor of shape (N, C, Hmask, Wmask) or (N, 1, Hmask, Wmask) for
class-specific or class-agnostic prediction.
uncertainty_func: A function that takes a Tensor of shape (N, C, P) or (N, 1, P) that
contains logit predictions for P points and returns their uncertainties as a Tensor of
shape (N, 1, P).
num_points (int): The number of points P to sample.
oversample_ratio (int): Oversampling parameter.
importance_sample_ratio (float): Ratio of points that are sampled via importnace sampling.
Returns:
point_coords (Tensor): A tensor of shape (N, P, 2) that contains the coordinates of P
sampled points.
"""
assert oversample_ratio >= 1
assert importance_sample_ratio <= 1 and importance_sample_ratio >= 0
num_boxes = coarse_logits.shape[0]
num_sampled = int(num_points * oversample_ratio)
point_coords = torch.rand(num_boxes, num_sampled, 2, device=coarse_logits.device)
point_logits = point_sample(coarse_logits, point_coords, align_corners=False)
# It is crucial to calculate uncertainty based on the sampled prediction value for the points.
# Calculating uncertainties of the coarse predictions first and sampling them for points leads
# to incorrect results.
# To illustrate this: assume uncertainty_func(logits)=-abs(logits), a sampled point between
# two coarse predictions with -1 and 1 logits has 0 logits, and therefore 0 uncertainty value.
# However, if we calculate uncertainties for the coarse predictions first,
# both will have -1 uncertainty, and the sampled point will get -1 uncertainty.
point_uncertainties = uncertainty_func(point_logits)
num_uncertain_points = int(importance_sample_ratio * num_points)
num_random_points = num_points - num_uncertain_points
idx = torch.topk(point_uncertainties[:, 0, :], k=num_uncertain_points, dim=1)[1]
shift = num_sampled * torch.arange(num_boxes, dtype=torch.long, device=coarse_logits.device)
idx += shift[:, None]
point_coords = point_coords.view(-1, 2)[idx.view(-1), :].view(
num_boxes, num_uncertain_points, 2
)
if num_random_points > 0:
point_coords = cat(
[
point_coords,
torch.rand(num_boxes, num_random_points, 2, device=coarse_logits.device),
],
dim=1,
)
return point_coords
def get_uncertain_point_coords_on_grid(uncertainty_map, num_points):
"""
Find `num_points` most uncertain points from `uncertainty_map` grid.
Args:
uncertainty_map (Tensor): A tensor of shape (N, 1, H, W) that contains uncertainty
values for a set of points on a regular H x W grid.
num_points (int): The number of points P to select.
Returns:
point_indices (Tensor): A tensor of shape (N, P) that contains indices from
[0, H x W) of the most uncertain points.
point_coords (Tensor): A tensor of shape (N, P, 2) that contains [0, 1] x [0, 1] normalized
coordinates of the most uncertain points from the H x W grid.
"""
R, _, H, W = uncertainty_map.shape
h_step = 1.0 / float(H)
w_step = 1.0 / float(W)
num_points = min(H * W, num_points)
point_indices = torch.topk(uncertainty_map.view(R, H * W), k=num_points, dim=1)[1]
point_coords = torch.zeros(R, num_points, 2, dtype=torch.float, device=uncertainty_map.device)
point_coords[:, :, 0] = w_step / 2.0 + (point_indices % W).to(torch.float) * w_step
point_coords[:, :, 1] = h_step / 2.0 + (point_indices // W).to(torch.float) * h_step
return point_indices, point_coords
def point_sample_fine_grained_features(features_list, feature_scales, boxes, point_coords):
"""
Get features from feature maps in `features_list` that correspond to specific point coordinates
inside each bounding box from `boxes`.
Args:
features_list (list[Tensor]): A list of feature map tensors to get features from.
feature_scales (list[float]): A list of scales for tensors in `features_list`.
boxes (list[Boxes]): A list of I Boxes objects that contain R_1 + ... + R_I = R boxes all
together.
point_coords (Tensor): A tensor of shape (R, P, 2) that contains
[0, 1] x [0, 1] box-normalized coordinates of the P sampled points.
Returns:
point_features (Tensor): A tensor of shape (R, C, P) that contains features sampled
from all features maps in feature_list for P sampled points for all R boxes in `boxes`.
point_coords_wrt_image (Tensor): A tensor of shape (R, P, 2) that contains image-level
coordinates of P points.
"""
cat_boxes = Boxes.cat(boxes)
num_boxes = [len(b) for b in boxes]
point_coords_wrt_image = get_point_coords_wrt_image(cat_boxes.tensor, point_coords)
split_point_coords_wrt_image = torch.split(point_coords_wrt_image, num_boxes)
point_features = []
for idx_img, point_coords_wrt_image_per_image in enumerate(split_point_coords_wrt_image):
point_features_per_image = []
for idx_feature, feature_map in enumerate(features_list):
h, w = feature_map.shape[-2:]
scale = torch.tensor([w, h], device=feature_map.device) / feature_scales[idx_feature]
point_coords_scaled = point_coords_wrt_image_per_image / scale
point_features_per_image.append(
point_sample(
feature_map[idx_img].unsqueeze(0),
point_coords_scaled.unsqueeze(0),
align_corners=False,
)
.squeeze(0)
.transpose(1, 0)
)
point_features.append(cat(point_features_per_image, dim=1))
return cat(point_features, dim=0), point_coords_wrt_image
def get_point_coords_wrt_image(boxes_coords, point_coords):
"""
Convert box-normalized [0, 1] x [0, 1] point cooordinates to image-level coordinates.
Args:
boxes_coords (Tensor): A tensor of shape (R, 4) that contains bounding boxes.
coordinates.
point_coords (Tensor): A tensor of shape (R, P, 2) that contains
[0, 1] x [0, 1] box-normalized coordinates of the P sampled points.
Returns:
point_coords_wrt_image (Tensor): A tensor of shape (R, P, 2) that contains
image-normalized coordinates of P sampled points.
"""
with torch.no_grad():
point_coords_wrt_image = point_coords.clone()
point_coords_wrt_image[:, :, 0] = point_coords_wrt_image[:, :, 0] * (
boxes_coords[:, None, 2] - boxes_coords[:, None, 0]
)
point_coords_wrt_image[:, :, 1] = point_coords_wrt_image[:, :, 1] * (
boxes_coords[:, None, 3] - boxes_coords[:, None, 1]
)
point_coords_wrt_image[:, :, 0] += boxes_coords[:, None, 0]
point_coords_wrt_image[:, :, 1] += boxes_coords[:, None, 1]
return point_coords_wrt_imageroi_heads.py:
import numpy as np
import torch
from detectron2.layers import ShapeSpec, cat, interpolate
from detectron2.modeling import ROI_HEADS_REGISTRY, StandardROIHeads
from detectron2.modeling.roi_heads.mask_head import (
build_mask_head,
mask_rcnn_inference,
mask_rcnn_loss,
)
from detectron2.modeling.roi_heads.roi_heads import select_foreground_proposals
from .point_features import (
generate_regular_grid_point_coords,
get_uncertain_point_coords_on_grid,
get_uncertain_point_coords_with_randomness,
point_sample,
point_sample_fine_grained_features,
)
from .point_head import build_point_head, roi_mask_point_loss
def calculate_uncertainty(logits, classes):
"""
We estimate uncerainty as L1 distance between 0.0 and the logit prediction in 'logits' for the
foreground class in `classes`.
Args:
logits (Tensor): A tensor of shape (R, C, ...) or (R, 1, ...) for class-specific or
class-agnostic, where R is the total number of predicted masks in all images and C is
the number of foreground classes. The values are logits.
classes (list): A list of length R that contains either predicted of ground truth class
for eash predicted mask.
Returns:
scores (Tensor): A tensor of shape (R, 1, ...) that contains uncertainty scores with
the most uncertain locations having the highest uncertainty score.
"""
if logits.shape[1] == 1:
gt_class_logits = logits.clone()
else:
gt_class_logits = logits[
torch.arange(logits.shape[0], device=logits.device), classes
].unsqueeze(1)
return -(torch.abs(gt_class_logits))
@ROI_HEADS_REGISTRY.register()
class PointRendROIHeads(StandardROIHeads):
"""
The RoI heads class for PointRend instance segmentation models.
In this class we redefine the mask head of `StandardROIHeads` leaving all other heads intact.
To avoid namespace conflict with other heads we use names starting from `mask_` for all
variables that correspond to the mask head in the class's namespace.
"""
def __init__(self, cfg, input_shape):
# TODO use explicit args style
super().__init__(cfg, input_shape)
self._init_mask_head(cfg, input_shape)
def _init_mask_head(self, cfg, input_shape):
# fmt: off
self.mask_on = cfg.MODEL.MASK_ON
if not self.mask_on:
return
self.mask_coarse_in_features = cfg.MODEL.ROI_MASK_HEAD.IN_FEATURES
self.mask_coarse_side_size = cfg.MODEL.ROI_MASK_HEAD.POOLER_RESOLUTION
self._feature_scales = {k: 1.0 / v.stride for k, v in input_shape.items()}
# fmt: on
in_channels = np.sum([input_shape[f].channels for f in self.mask_coarse_in_features])
self.mask_coarse_head = build_mask_head(
cfg,
ShapeSpec(
channels=in_channels,
width=self.mask_coarse_side_size,
height=self.mask_coarse_side_size,
),
)
self._init_point_head(cfg, input_shape)
def _init_point_head(self, cfg, input_shape):
# fmt: off
self.mask_point_on = cfg.MODEL.ROI_MASK_HEAD.POINT_HEAD_ON
if not self.mask_point_on:
return
assert cfg.MODEL.ROI_HEADS.NUM_CLASSES == cfg.MODEL.POINT_HEAD.NUM_CLASSES
self.mask_point_in_features = cfg.MODEL.POINT_HEAD.IN_FEATURES
self.mask_point_train_num_points = cfg.MODEL.POINT_HEAD.TRAIN_NUM_POINTS
self.mask_point_oversample_ratio = cfg.MODEL.POINT_HEAD.OVERSAMPLE_RATIO
self.mask_point_importance_sample_ratio = cfg.MODEL.POINT_HEAD.IMPORTANCE_SAMPLE_RATIO
# next two parameters are use in the adaptive subdivions inference procedure
self.mask_point_subdivision_steps = cfg.MODEL.POINT_HEAD.SUBDIVISION_STEPS
self.mask_point_subdivision_num_points = cfg.MODEL.POINT_HEAD.SUBDIVISION_NUM_POINTS
# fmt: on
in_channels = np.sum([input_shape[f].channels for f in self.mask_point_in_features])
self.mask_point_head = build_point_head(
cfg, ShapeSpec(channels=in_channels, width=1, height=1)
)
def _forward_mask(self, features, instances):
"""
Forward logic of the mask prediction branch.
Args:
features (dict[str, Tensor]): #level input features for mask prediction
instances (list[Instances]): the per-image instances to train/predict masks.
In training, they can be the proposals.
In inference, they can be the predicted boxes.
Returns:
In training, a dict of losses.
In inference, update `instances` with new fields "pred_masks" and return it.
"""
if not self.mask_on:
return {} if self.training else instances
if self.training:
proposals, _ = select_foreground_proposals(instances, self.num_classes)
proposal_boxes = [x.proposal_boxes for x in proposals]
mask_coarse_logits = self._forward_mask_coarse(features, proposal_boxes)
losses = {"loss_mask": mask_rcnn_loss(mask_coarse_logits, proposals)}
losses.update(self._forward_mask_point(features, mask_coarse_logits, proposals))
return losses
else:
pred_boxes = [x.pred_boxes for x in instances]
mask_coarse_logits = self._forward_mask_coarse(features, pred_boxes)
mask_logits = self._forward_mask_point(features, mask_coarse_logits, instances)
mask_rcnn_inference(mask_logits, instances)
return instances
def _forward_mask_coarse(self, features, boxes):
"""
Forward logic of the coarse mask head.
"""
point_coords = generate_regular_grid_point_coords(
np.sum(len(x) for x in boxes), self.mask_coarse_side_size, boxes[0].device
)
mask_coarse_features_list = [features[k] for k in self.mask_coarse_in_features]
features_scales = [self._feature_scales[k] for k in self.mask_coarse_in_features]
# For regular grids of points, this function is equivalent to `len(features_list)' calls
# of `ROIAlign` (with `SAMPLING_RATIO=2`), and concat the results.
mask_features, _ = point_sample_fine_grained_features(
mask_coarse_features_list, features_scales, boxes, point_coords
)
return self.mask_coarse_head(mask_features)
def _forward_mask_point(self, features, mask_coarse_logits, instances):
"""
Forward logic of the mask point head.
"""
if not self.mask_point_on:
return {} if self.training else mask_coarse_logits
mask_features_list = [features[k] for k in self.mask_point_in_features]
features_scales = [self._feature_scales[k] for k in self.mask_point_in_features]
if self.training:
proposal_boxes = [x.proposal_boxes for x in instances]
gt_classes = cat([x.gt_classes for x in instances])
with torch.no_grad():
point_coords = get_uncertain_point_coords_with_randomness(
mask_coarse_logits,
lambda logits: calculate_uncertainty(logits, gt_classes),
self.mask_point_train_num_points,
self.mask_point_oversample_ratio,
self.mask_point_importance_sample_ratio,
)
fine_grained_features, point_coords_wrt_image = point_sample_fine_grained_features(
mask_features_list, features_scales, proposal_boxes, point_coords
)
coarse_features = point_sample(mask_coarse_logits, point_coords, align_corners=False)
point_logits = self.mask_point_head(fine_grained_features, coarse_features)
return {
"loss_mask_point": roi_mask_point_loss(
point_logits, instances, point_coords_wrt_image
)
}
else:
pred_boxes = [x.pred_boxes for x in instances]
pred_classes = cat([x.pred_classes for x in instances])
# The subdivision code will fail with the empty list of boxes
if len(pred_classes) == 0:
return mask_coarse_logits
mask_logits = mask_coarse_logits.clone()
for subdivions_step in range(self.mask_point_subdivision_steps):
mask_logits = interpolate(
mask_logits, scale_factor=2, mode="bilinear", align_corners=False
)
# If `mask_point_subdivision_num_points` is larger or equal to the
# resolution of the next step, then we can skip this step
H, W = mask_logits.shape[-2:]
if (
self.mask_point_subdivision_num_points >= 4 * H * W
and subdivions_step < self.mask_point_subdivision_steps - 1
):
continue
uncertainty_map = calculate_uncertainty(mask_logits, pred_classes)
point_indices, point_coords = get_uncertain_point_coords_on_grid(
uncertainty_map, self.mask_point_subdivision_num_points
)
fine_grained_features, _ = point_sample_fine_grained_features(
mask_features_list, features_scales, pred_boxes, point_coords
)
coarse_features = point_sample(
mask_coarse_logits, point_coords, align_corners=False
)
point_logits = self.mask_point_head(fine_grained_features, coarse_features)
# put mask point predictions to the right places on the upsampled grid.
R, C, H, W = mask_logits.shape
point_indices = point_indices.unsqueeze(1).expand(-1, C, -1)
mask_logits = (
mask_logits.reshape(R, C, H * W)
.scatter_(2, point_indices, point_logits)
.view(R, C, H, W)
)
return mask_logits4. PointRend config
如:rcnn_R_50_FPN.yaml
MODEL:
META_ARCHITECTURE: "GeneralizedRCNN"
BACKBONE:
NAME: "build_resnet_fpn_backbone"
RESNETS:
OUT_FEATURES: ["res2", "res3", "res4", "res5"]
FPN:
IN_FEATURES: ["res2", "res3", "res4", "res5"]
ANCHOR_GENERATOR:
SIZES: [[32], [64], [128], [256], [512]] # One size for each in feature map
ASPECT_RATIOS: [[0.5, 1.0, 2.0]] # Three aspect ratios (same for all in feature maps)
RPN:
IN_FEATURES: ["p2", "p3", "p4", "p5", "p6"]
PRE_NMS_TOPK_TRAIN: 2000 # Per FPN level
PRE_NMS_TOPK_TEST: 1000 # Per FPN level
# Detectron1 uses 2000 proposals per-batch,
# (See "modeling/rpn/rpn_outputs.py" for details of this legacy issue)
# which is approximately 1000 proposals per-image since the default batch size for FPN is 2.
POST_NMS_TOPK_TRAIN: 1000
POST_NMS_TOPK_TEST: 1000
ROI_HEADS:
NAME: "PointRendROIHeads"
IN_FEATURES: ["p2", "p3", "p4", "p5"]
ROI_BOX_HEAD:
NAME: "FastRCNNConvFCHead"
NUM_FC: 2
POOLER_RESOLUTION: 7
TRAIN_ON_PRED_BOXES: True
ROI_MASK_HEAD:
NAME: "CoarseMaskHead"
FC_DIM: 1024
NUM_FC: 2
OUTPUT_SIDE_RESOLUTION: 7
IN_FEATURES: ["p2"]
POINT_HEAD_ON: True
POINT_HEAD:
FC_DIM: 256
NUM_FC: 3
IN_FEATURES: ["p2"]
DATASETS:
TRAIN: ("coco_2017_train",)
TEST: ("coco_2017_val",)
SOLVER:
IMS_PER_BATCH: 16
BASE_LR: 0.02
STEPS: (60000, 80000)
MAX_ITER: 90000
INPUT:
# PointRend for instance segmenation does not work with "polygon" mask_format.
MASK_FORMAT: "bitmask"
MIN_SIZE_TRAIN: (640, 672, 704, 736, 768, 800)
VERSION: 2
12 comments
可以用detectron2的 PointRend训练coco数据集吗
可以的,pointrend 只是 head 端的mask处理
请教下,作者下载的哪一版本的detectron2呢
Tag v0.3
作者大大,我发现官方Tag v0.3的pointrend的预训练模型没法下载了⌇●﹏●⌇ 你那有保存吗,有偿,求帮助啊
好像没有,最新的不可用了吗?
不知道是不是版本差异的原因,用最新版的模型的话,不报错但是没效果
损失函数正常吗?训练精度呢?
怎么可视化没看明白,新人
具体是指哪一部分?
feature_map[idx_img].unsqueeze(0) 理解不了
可以串一下前后代码,比如 point_sample 函数要求的输入.